Hi,
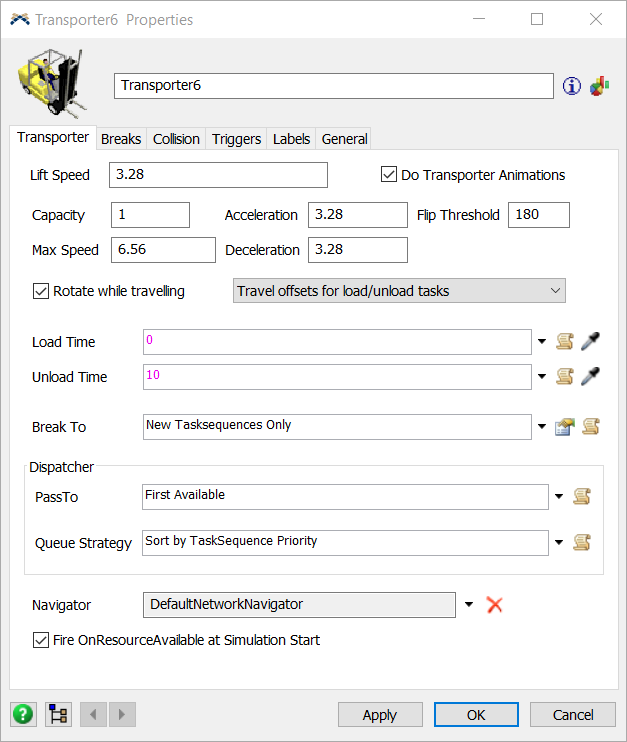
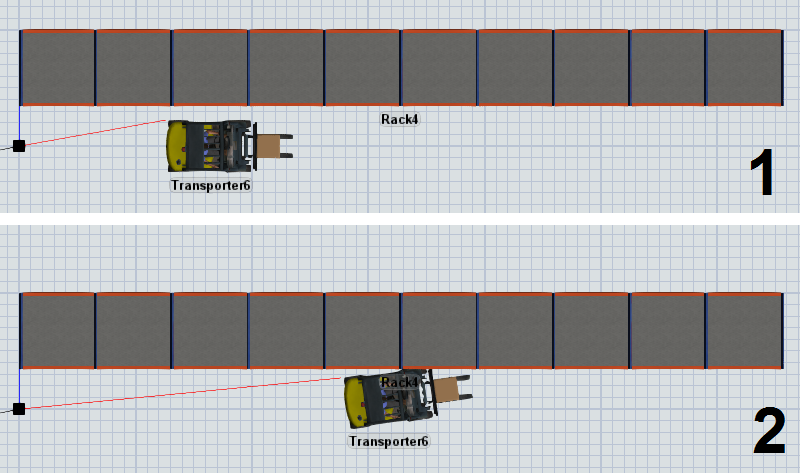
I have a problem with a transporter using TASKTYPE_PLACEOFFSET. Please see the attached sample model. At moment 58s the transporter is unloading a box to the rack and directly starts moving its fork downwards, although the token is still in the Unload-Activity. How can I make the fork movement wait until the unload-task is completed? If you allow offset-travel it works correctly, but then the transporter drives into the rack while performing the unload-task, which is something I would like to avoid.
{kind=link}