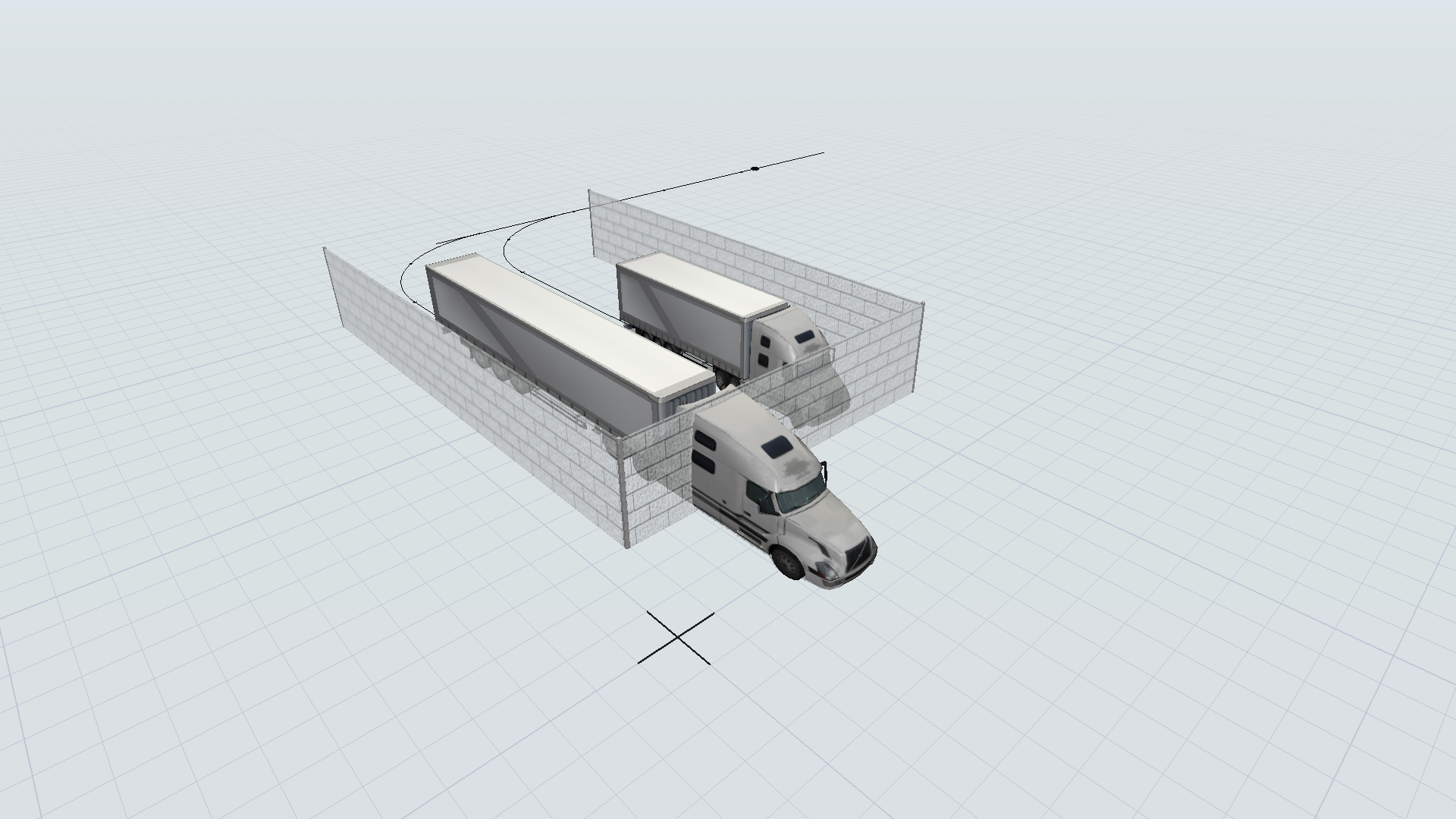
My AGVs (here: trucks) have a travel task to a control point. But I want they stop at the control point exactly when their leading edges reach the control point (and not the center of the AGV).
How could I do it? Thanks for you help!
20190204-agv-stop-leadingedge.fsm
{kind=link}