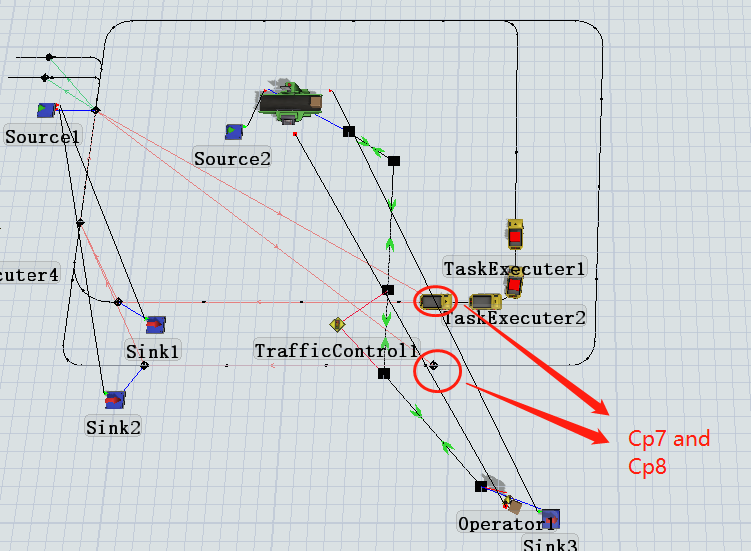
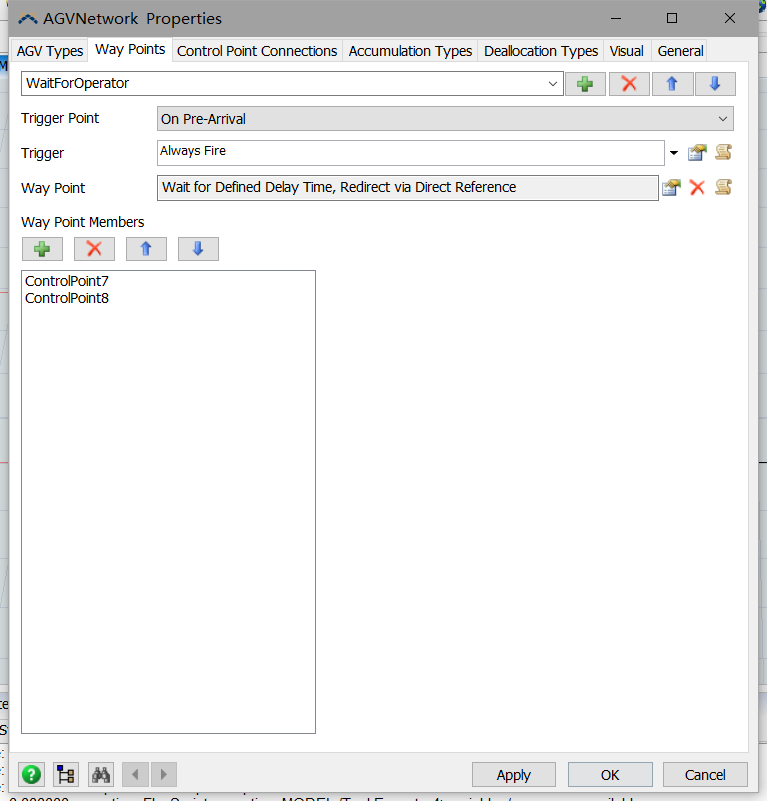
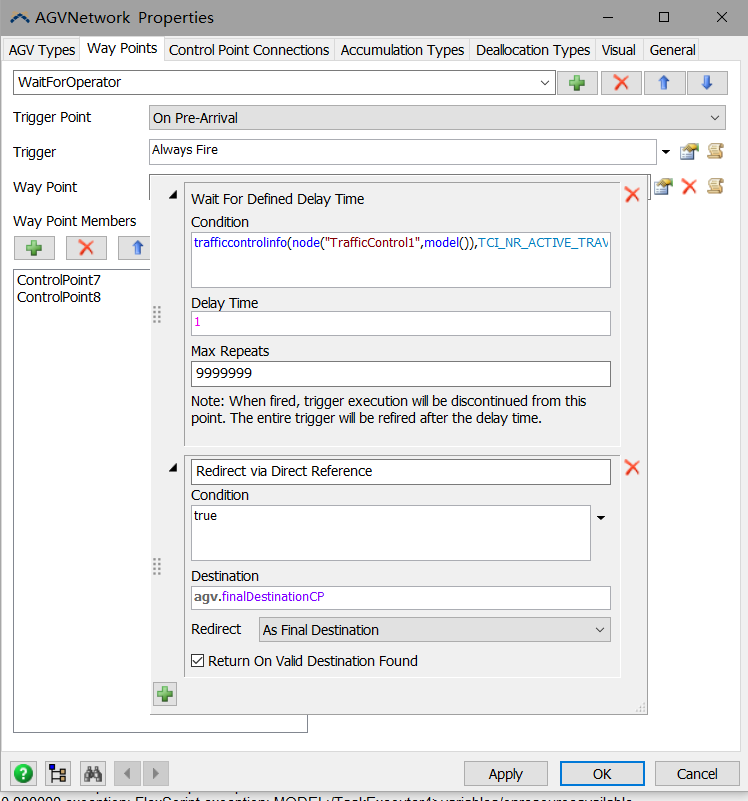
I just started learning Flexsim. I made a project with reference to the examples on the forum. The purpose is to realize that after the AGV meets the OPerator, the AGV can wait for the operator passing by to start the task again. Now the AGV can wait for the operator, but it cannot perform the task again. It has been waiting there. Some of my settings are shown below:

{kind=link}