Hello Flexsim Forum,
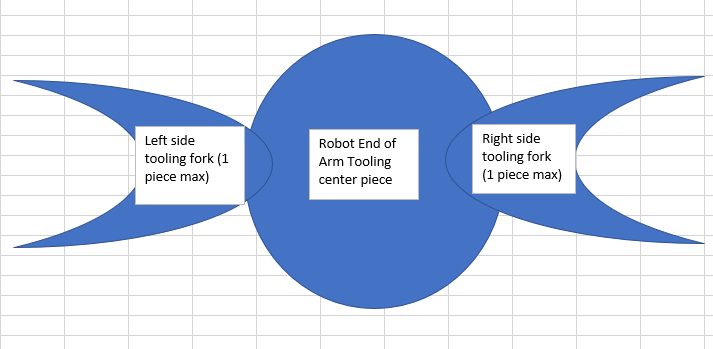
Im looking to simulate a robot in a work cell, however this robot has end of arm tooling that allows it to exchange finished goods with to be processed goods by using two different sides of its tooling. I've attached a basic drawing to picture what the tooling looks like. When making movements, the robot will pick an unprocessed item, move to the next process, exchange tooling to pick the finished good, rotate tooling again, then place the original unprocessed item. Physically the pick & deposit location in the processes are the same position.
Items arrive in the model from 2 different sources & must go through the following steps (burn off, cooling, dial table press) before being placed on a balancing lane where other work not in the scope of this model will occur.
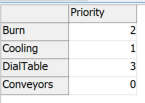
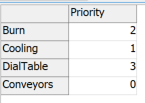
However the robot functions as the transport of items within this cell but uses priority logic to decide what moves to make instead of always using sequential movements. I will need the flexibility to change the priority based on controls team feedback to optimize the movements within the cell.
For now the main priorities are as follows (Dial table, burn, cooling). In the instance of the dial table, once the dial table process finishes, the robot should grab a finished cooled item, grab the dial table part, place the cooled part, then move the finished dial table part to the balance line.
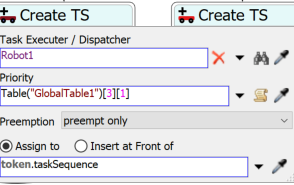
How do I simulate the robot pick//place behavior & include priorities for it's movements?
Pick Exchange Deposit Robot Model.fsm
{kind=link}
{kind=link}