Hi,
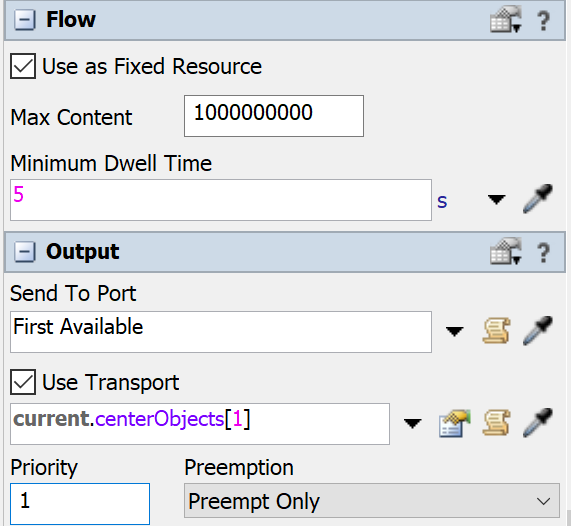
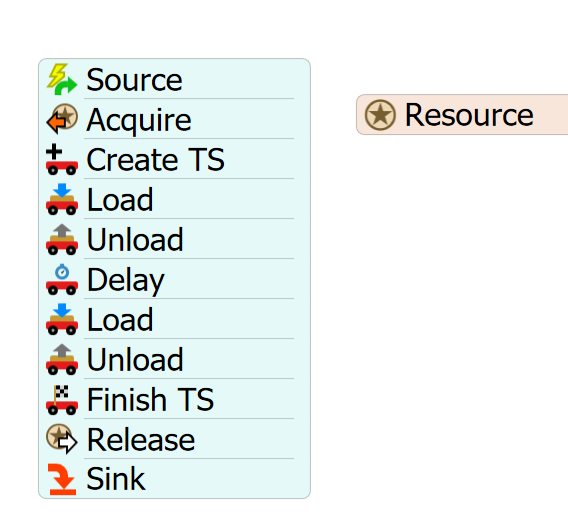
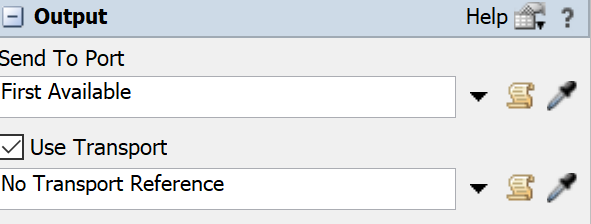
Can anyone help me. I am trying to get the robot in my simulation to labeled bottle and bring it to its assigned rack but not release it, wait for 5 seconds, then the robot moves the bottle to the final conveyor. I know this deals with process flow but I am confused.

{kind=link}