Dear Community,
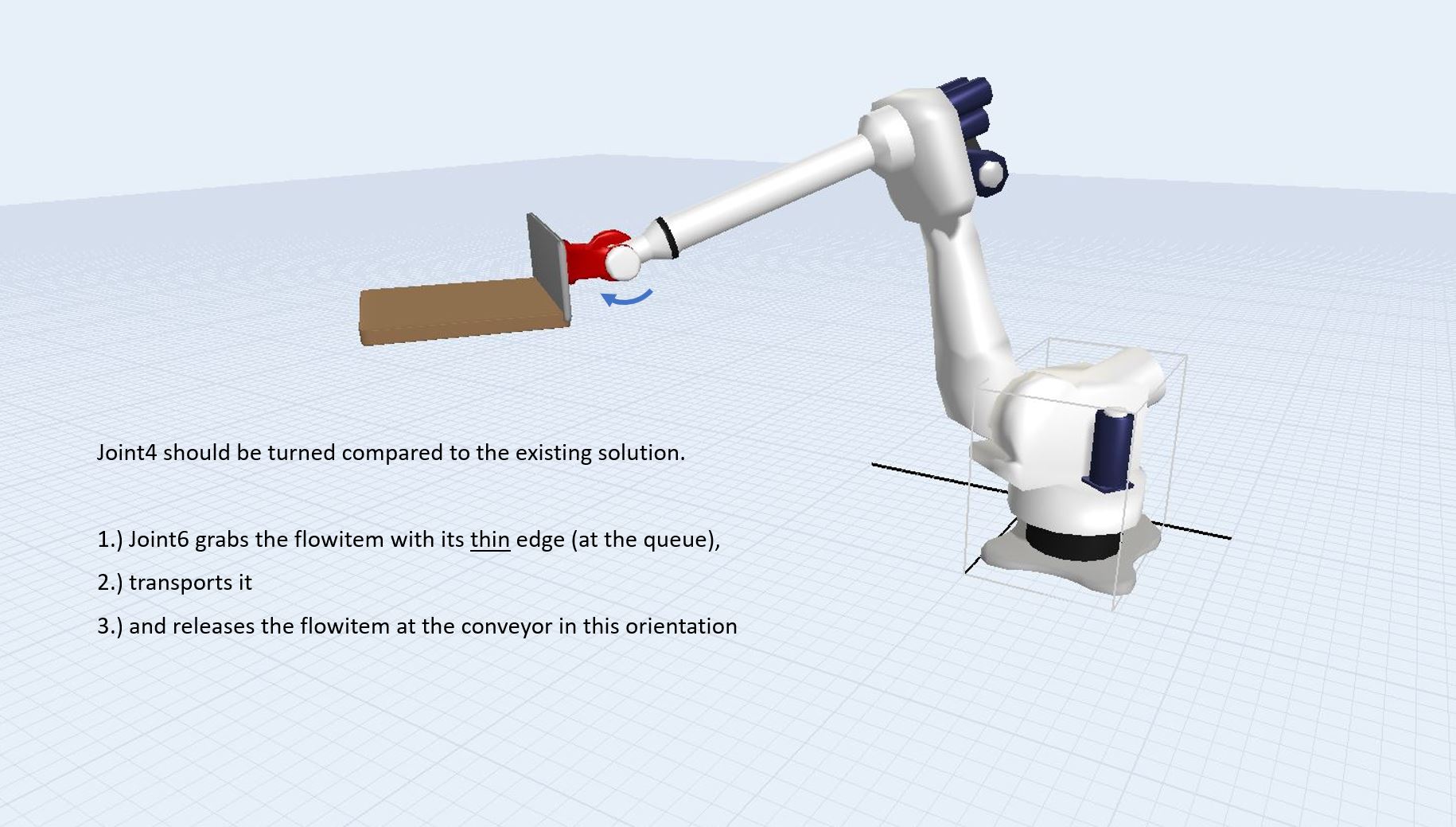
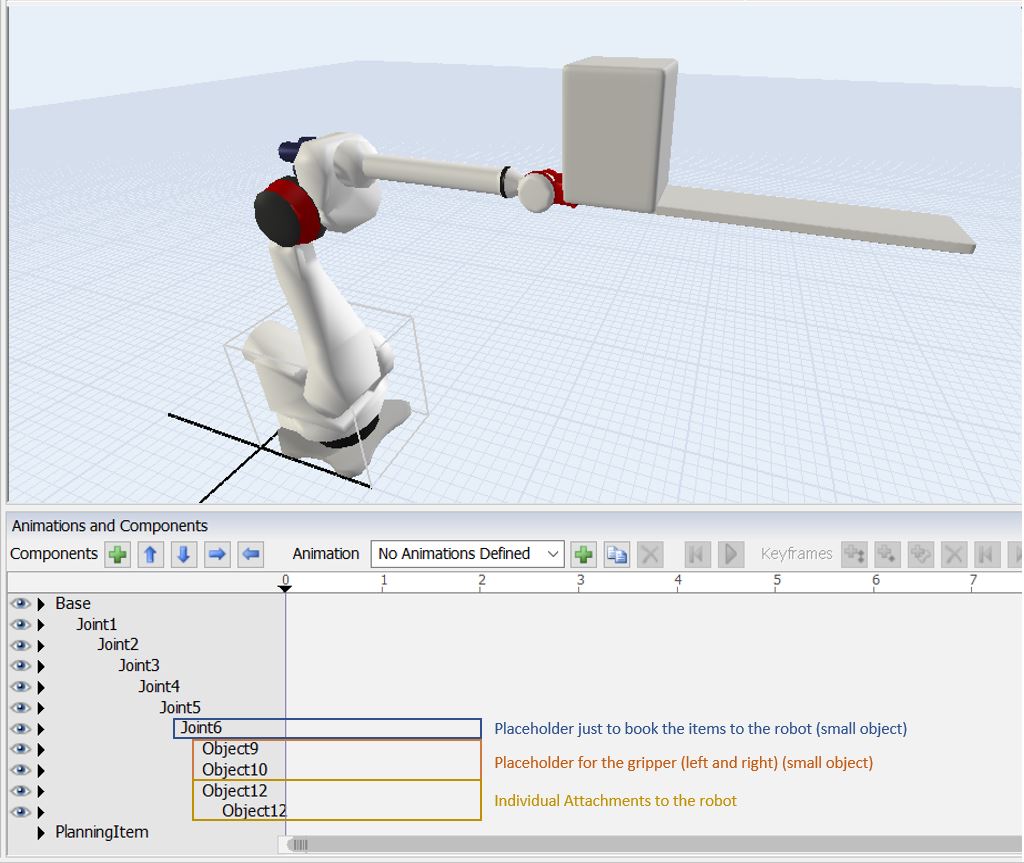
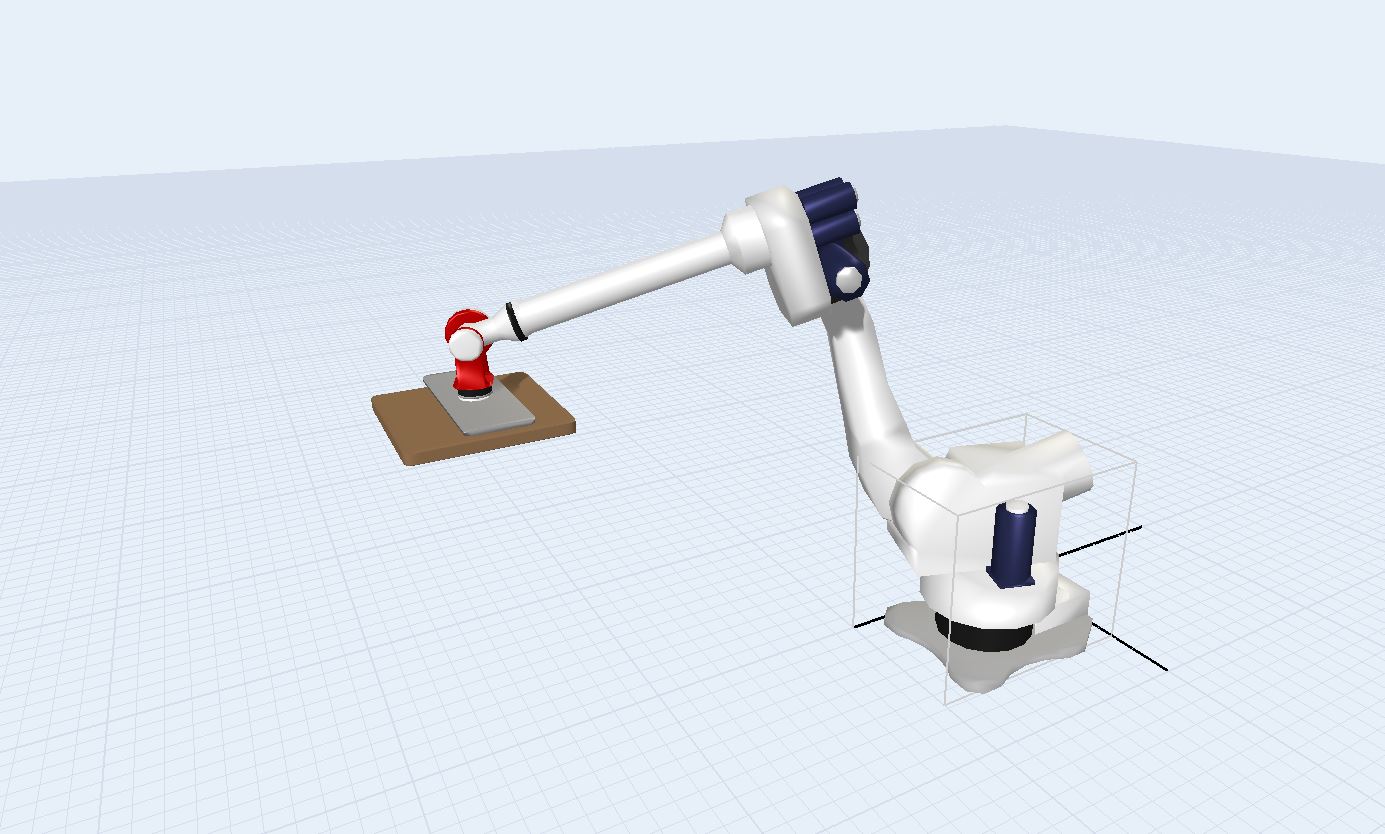
I would like to change the “snapping surface” of Joint6 on the standard robot. The goal is that flowitems are grabbed and hold with the thin edge of Joint6 instead of the flat surface as default. See the pictures attached.
Once I can do this, I can edit or change the Joint6 3D-shape (e.g. to a fork or a vacuum manipulator).
- Is there a easy way to change the “snapping surface” in the robot and simply turn Joint4?
- Is it necessary to rotate every single 3D-shape of the default robot Joints in AC3D (x rotation 90 degrees)?
- Or should I develop a process flow “Change Visual” for the flowitem (as soon as it snapped to the robot the flowitem rotates and positions. As soon as the flowitem is released by the robot the flowitem must be rotated back in the original position?
I tried multiple ways but didn’t figure out a workable solution yet.
What is the easiest way in FlexSim 2018?
Thank you, Markus

{kind=link}