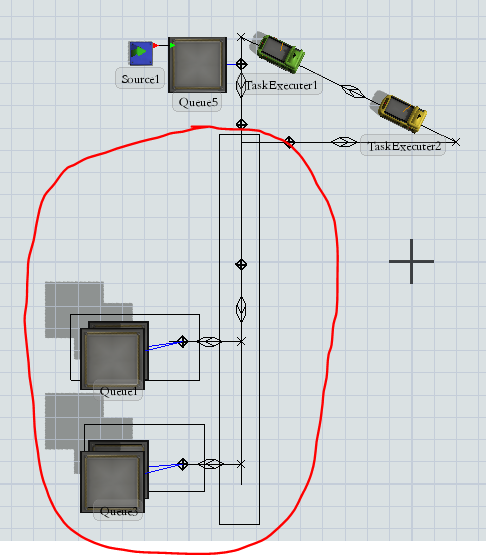
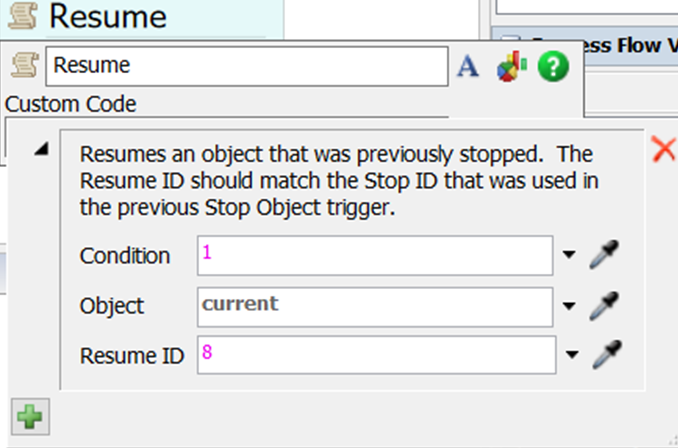
Hello, I'm using Stop and Resume in process flow. It shows the ResumeID should match the StopID.
I deliberately wrote 8 in Resume ID field, but the StopID I used earlier is 1. It seems token is still released even if the Stop and resume ID is not the same.
Another problem is that is it permitted to use 2 Stop activities and use identical StopID? In my model I use 2 Stop activities with identical StopID==1, I would like to know if there's possibilty that tokenA been resumed by another token, because they use same resumeID?