Hi @Jordan Johnson ,
We have made an example model to show a problem we have with some AGVs. This is the same model as you helped me on before (with the finalizeSpatialChanges before redirecting the AGV).
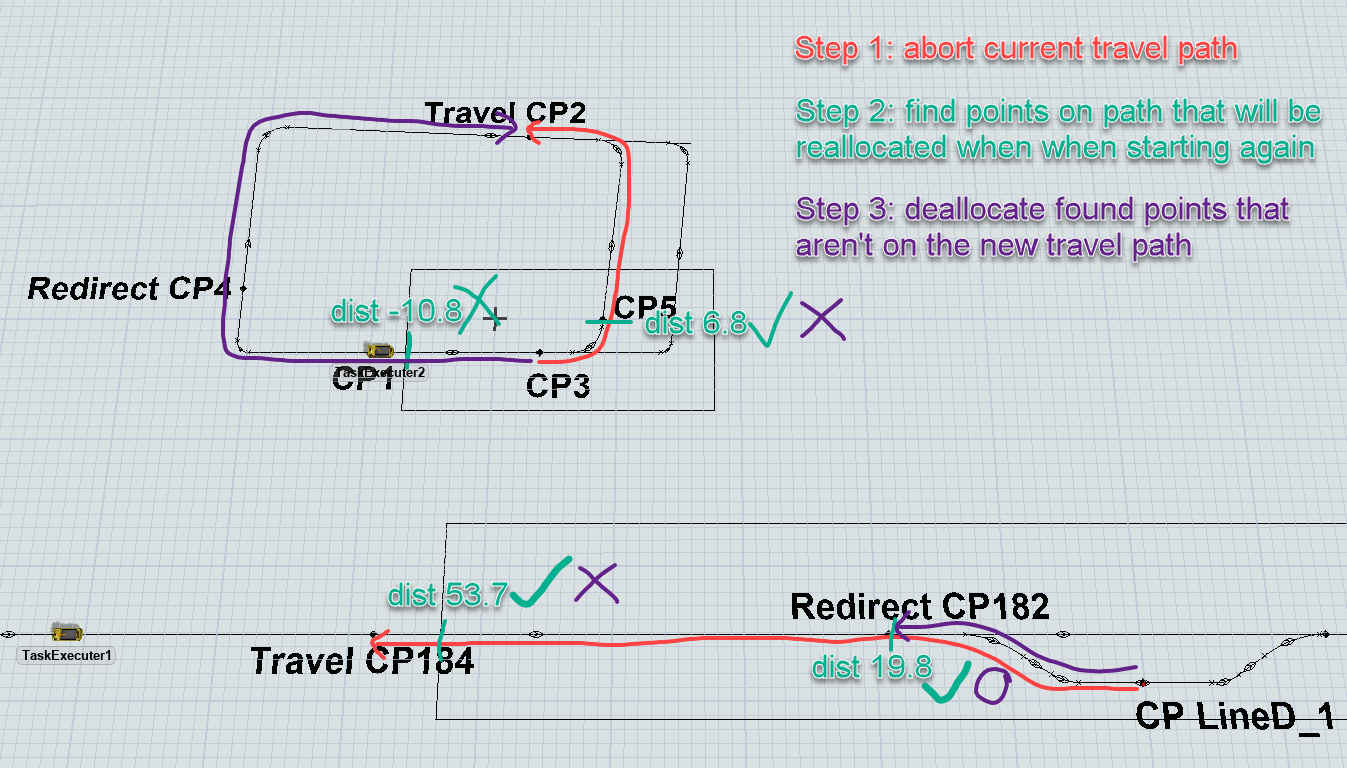
Somehow the AGV release the control area when it starts traveling again. I can’t really figure out how this is happening, maybe you have some ideas?
The problem can be seen at time 119.05.
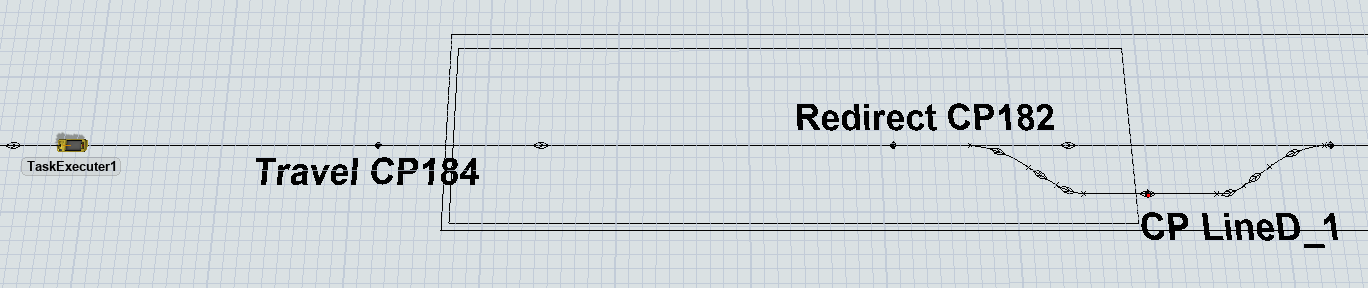
You might also notice the small network above the current network. That was my first example model, but in that model, I could not reproduce the issue. When I copied part of the actual model, I could reproduce the problem.
Thank you already for your time.
Patrick