Good Day,
How can I make an AGV that by pass the one in front of it if it needs to pass through?
Because I dont want the agv to waiting in line
I am currently simulating a Tugger, but a Tugger supposedly can by pass the tugger infront of it if it stop
Currently I m using Process Flow template for AGV, Control Point, and Straight Path
Second Question :
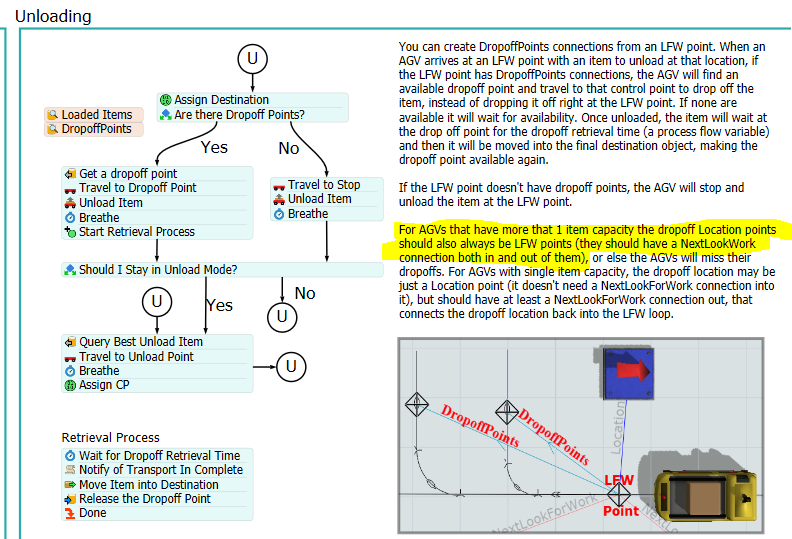
Can anyone explain more of these explanation? My tugger have a capacity of 3 currently, but i can't make it drop all 3 at the same time (if its the same location)
I have difficulty to understand where the nextlookforwork should be connected to ?
Thank you
