I am planning to build a much larger and complex system, but the model I have attached addresses my main question. How do I avoid collision between task executers? In the example I have attached, each task executer has a different speed, and one eventually passes the other. I want them to stay idle rather than going over each other. I know the AGV template does this nicely, but for this application, I believe that dispatchers will do better (each agv and tugger has a predefined path with specific pickup and drop off points. The AGV template chooses shortest path and other things that are not relevant to my model). How can I achieve this with regular travel nodes?
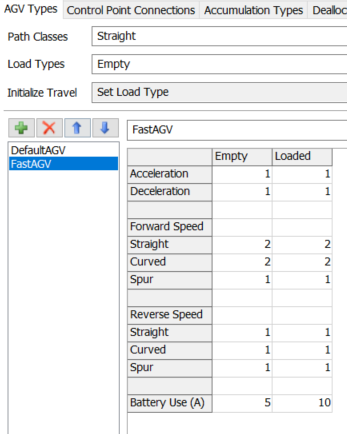
Hey @Jotam C, I modified your file and added a solution to the side of your model. I used an AGV network with paths and control points (CPs) similar to yours. I only used a dispatch with my Task Executers like you specified. I connected CPs with "NextWorkPoint" connections so the AGVs knew where to travel to next to execute their task. In the toolbox, I opened the "AGV Network" option to create a "FastAGV" with a speed of 2 (rather than the default 1).
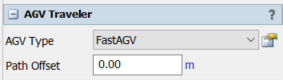
Then I assigned one of my TaskExecuters to be a "FastAGV" (Under Properties > AGV Traveler).
Here's what the result looks like:
The trailing AGV will stop at the previous CP until it has been cleared by the front AGV, thus preventing collisions. If you want the stops to be closer together, you can play around with CP distances and speeds, but I'm not sure how complex you're planning on making your model.
{kind=link}
14 People are following this question.