Attached models’ setting are the same, the only difference is one named ”… NoNetwork” do not use Network Nodes.
I’m using FlexSim 2016.1.2. However, I also attached same question using FlexSim 2022 just in case only few people can solve problem using 2016.
[Question]
When Network Nodes are not used, "preempt only" task(when breakdown) of the MultiProcessor can run sucessfully, but when using Network Nodes , the "preempt only" task of MultiProcessor fails, and the dispatcher dispatches operator according to FIFO and Priority.
What is the reason? How to fix it?
[Model Setting]
▪ Breakdown may occur in two Multiprocessors in the model, and when the breakdown occurs, operator are required to repair the machine ( "preempt only" task).
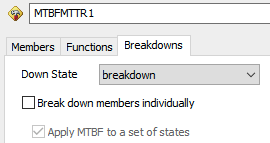
▪ Breakdown logic of a machine named MultiProcessorMTBF follows the MTBF setting.
▪ Breakdown logic of machine named MultiProcessorBreakByCode is written in the “Process Time” setting of “Process2”. If breakdown occurs, machine will be stopped and call operator in its OnMessage trigger (the code is copied and modified from MTBF).
▪ Opretor2 have rest time according to TimeTable setting. (state: Shedule down)
Eventually I want to achieve the following setting, if all could be solved at once will be perfect.
(1) Preempt only can be successfully executed in the situation with Network Nodes and self-define breakdown logic (e.g. code in MultiProcessorBreakByCode).
(2) When multiple machines have “preempt only” tasksequence at the same time (e.g. 2 machines), dispatcher can simultaneously call the number of operator required that are doing “no preempt” tasksequence to do “preempt only” tasksequence (in this case will be call 2 different operators at same time).
Current model might call the same operator for two machine with “preempt only” tasksequences, which is not the case I want.
(3) Prevent operator from doing “preempt only” tasks during the rest time set by TimeTable. (I didn’t set “preempt only”in TimeTable due to operator can start to rest only after completing tasksequence on hand)
preempt_BreakdownCode_F2016_NoNetwork.fsm
preempt_BreakdownCode_F2016.fsm