Hello,
I am looking for ideas for avoiding collision between operator and forklift. AStar can make objects detect collision but it depends on object size. I would like to simulate a wide range area detection for forklift, so operator must keep distance to forklift.
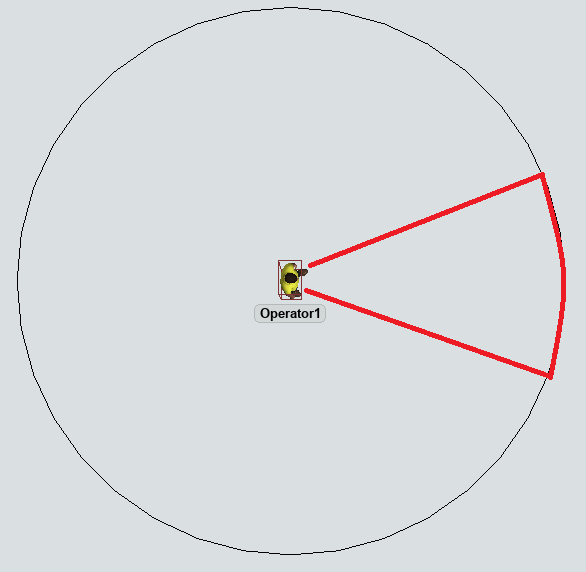
My first approach is using proximity system to define such logic. But I think it's more logical that taskexecuters should only detect neighbor in front of them. How to implement such detection rule that operator only detects object in red sector?
What if a forklift encounters an idle operator, how to make forklift change its route to maintain distance to operator? This sounds like how social force work but I don't know how to tweak parameters to achieve such logic.
