I was doing tests with creating a grid of AGV paths via code and the new "addAllocationPoint" method added 23.0.
I ran into an issue with AGVs not completing their travel tasks at certain points, when travelling in a certain direction (y- in the model). They either travel to their destination control point and stop but do not complete the task and keep the previous control point allocated as well.
Or they stop at the penultimate control point, allocate the next, final one but do not resume their travel.
When looking at the event list, I can see that in both cases neither a preArrival event, nor a traversal event are created.
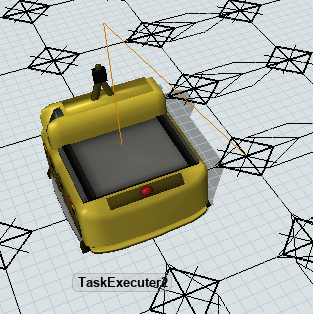
(Normal behaviour, the traversal event of the current control point and the preArrival event for the next one are visible)
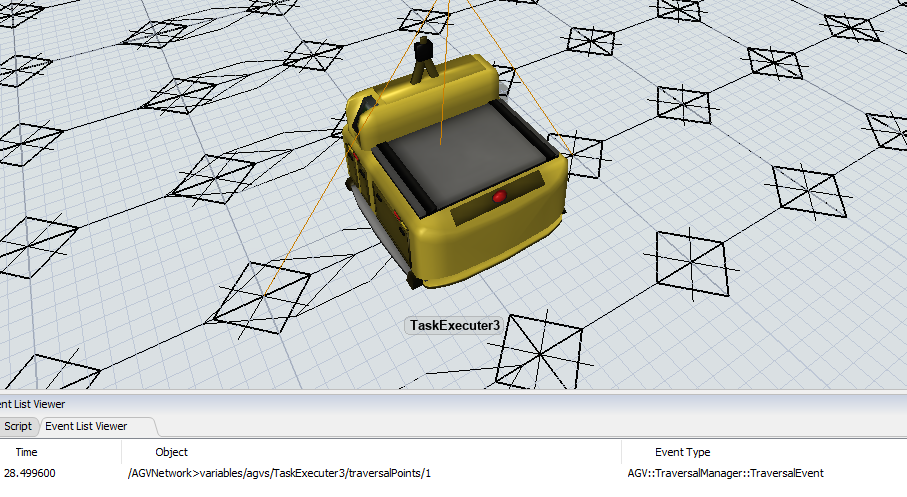
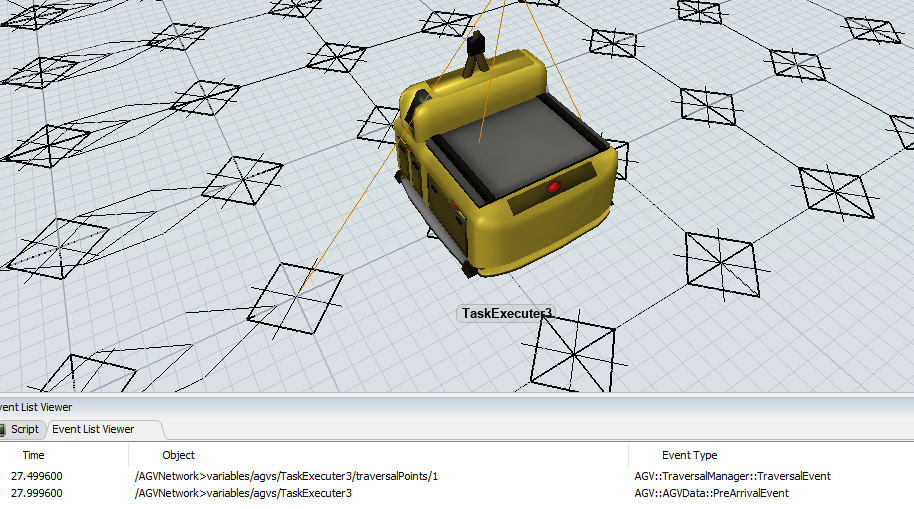
(Only the traversal event is pending, no event for the next control point)
Any idea what might be causing this? I was testing how to add additional allocation points to account for different AGV geometry (see TaskExecuter1 and its onBuildTravelPath trigger). So it's possible that I accidently screwed up something in the AGV logic. However the same issue happens in a fresh model that uses the same code to generate the grid and on a different PC as well.