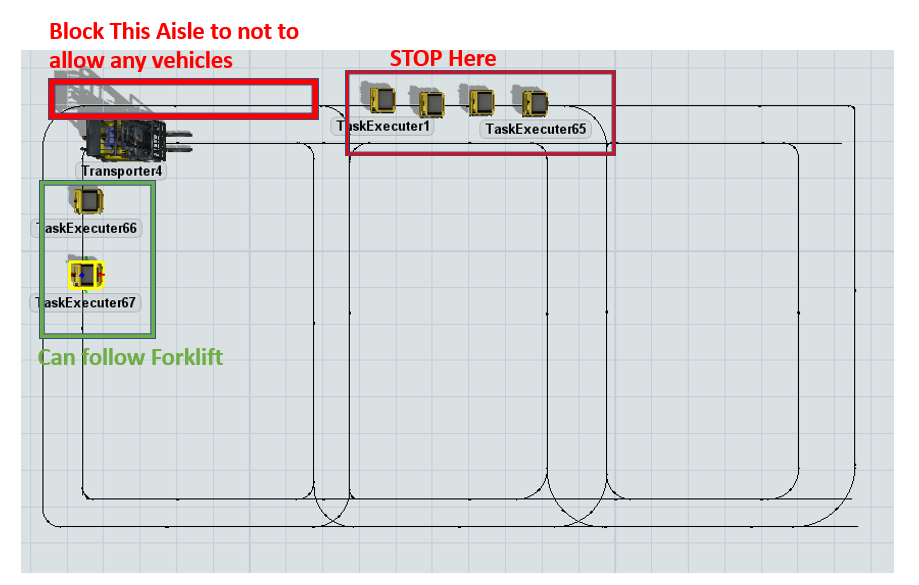
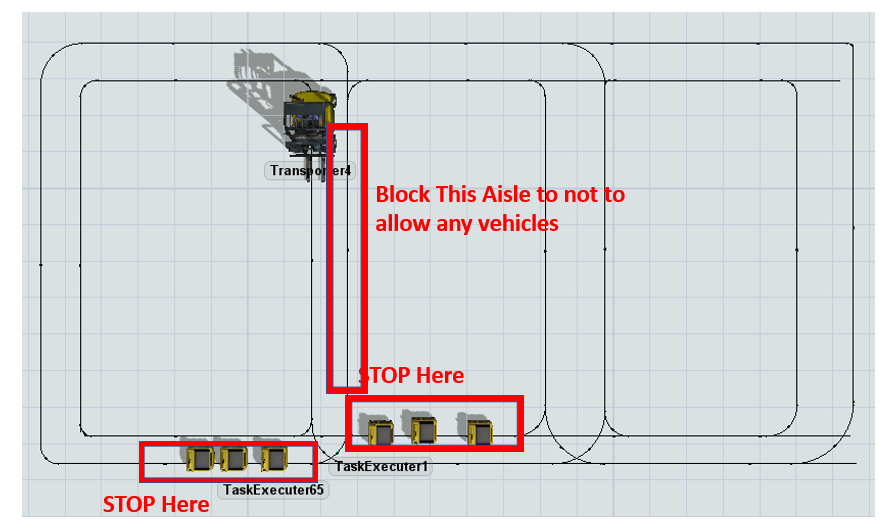
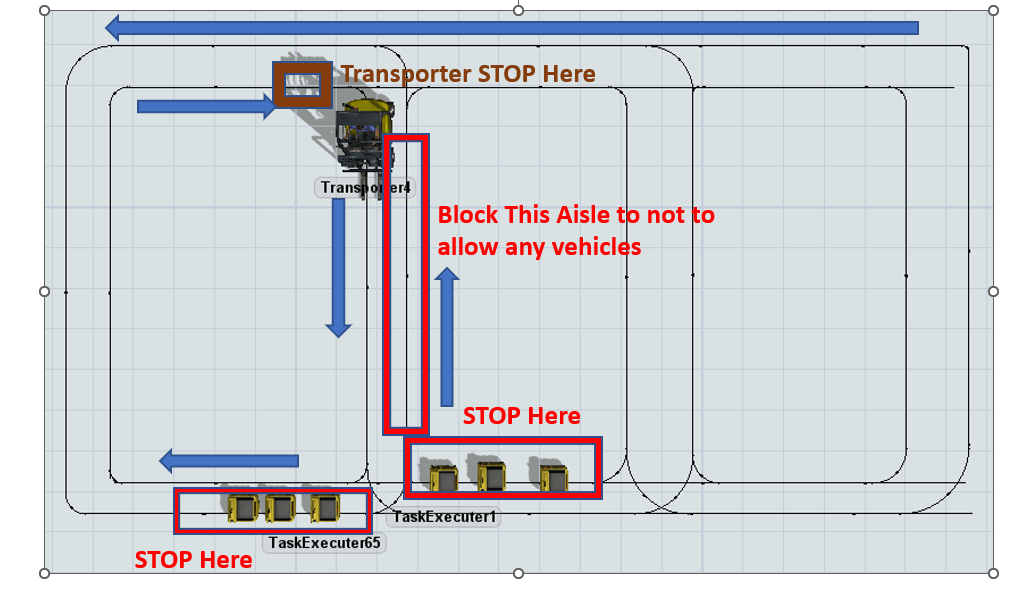
In My model a Big forklift (Transporter) is traveling on the aisles where other vehicles (TaskExecuter) such as tuggers or Electric pallet jacks use. when ever this forklift in on the aisles it should occupy whole aisle so that what ever coming in opposite direction should stop or do not enter the aisle until forklift exits that aisle. But what ever vehicles going in the same direction of Forklift can do there operations as usual.
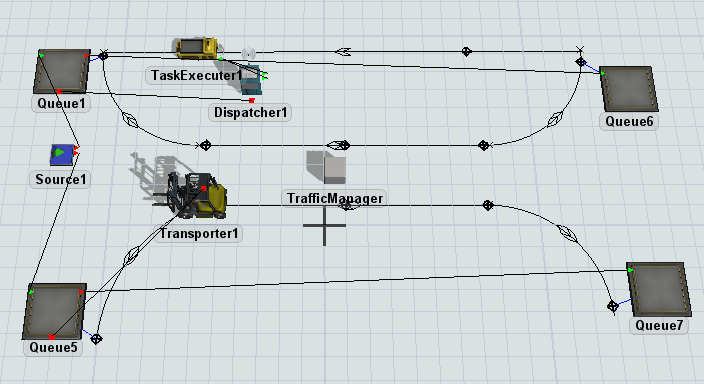
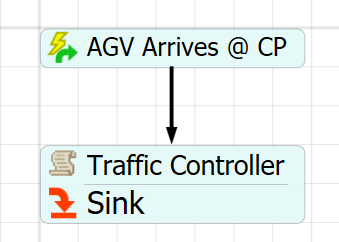
Please refer to attached images regarding more clarity about the question. Here i would like to know the logic how to stop opposite flow traffic when Big Forklift is on that specific aisles.