Hey all,
in my model i want to implement a logic for proximity behavior for 2 task executers.
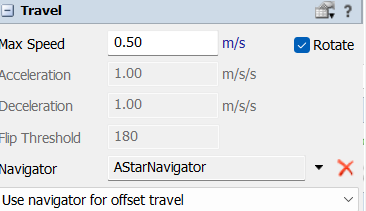
The agent system includes 2 zones of proximity. When task executer 2 is detecting the task executer 1 before it, its max speed is set to 0.5 and by further closing in and reaching the narrow zone the max speed is set to 0.05.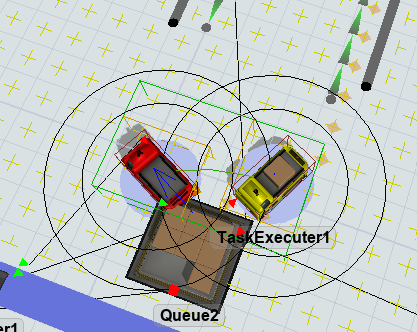
If task executer 1 is leaving the narrow proximity zone, the speed of task executer 2 should be set to 0.5 and respective for the broad zone to 2.
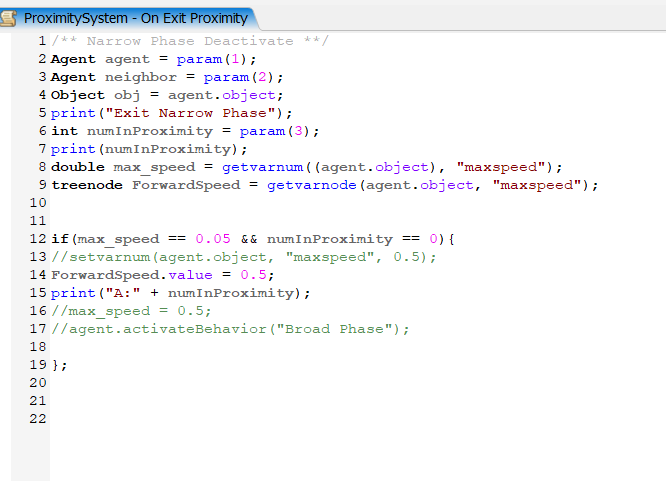
 In my case, the exit proximity triggers do not fire when the zones are exited, but after task executer 2 reaches the queue and picks up an item, its max speed switches directly to 2. Am i missing some information in the code for the on exit event trigger?
In my case, the exit proximity triggers do not fire when the zones are exited, but after task executer 2 reaches the queue and picks up an item, its max speed switches directly to 2. Am i missing some information in the code for the on exit event trigger?
kind regards
