I have replaced the 3D geometry of the robot joints, but when I play the simulation and press "reset", the robot goes to another gesture. Is there a way to save the current base position of a robot after I finish the settings of each joint by FlexScript?
This question was
closed
by
Jeanette F for the following reason: Other: No response
How to save the current base position of a robot by FlexScript?
FlexSim 24.1.0
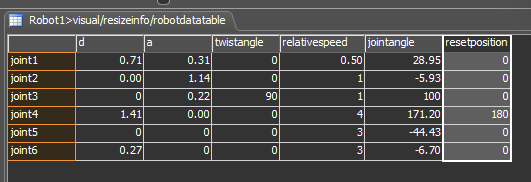
You could try changing the resetposition column values in this table, but I'm not sure if the model assumes the given starting position:
Is there a function to save the base position? Like we press the button in the robot animation module.
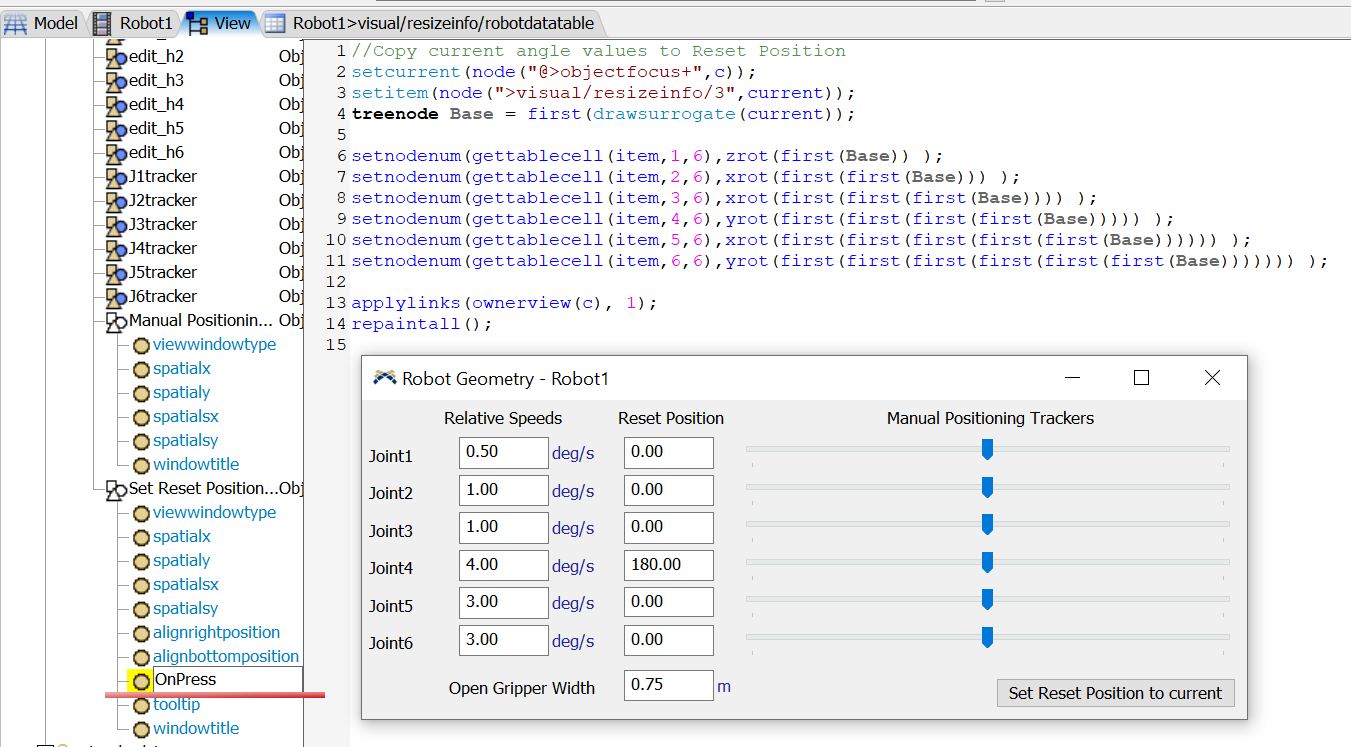
@royjuventus29, you find all in tree: here in View tree of an opened window from Robot Properties in active views
Hi @royjuventus29,
We haven't heard back from you. Were you able to solve your problem? If so, please add and accept an answer to let others know the solution. Or please respond to the previous comment so that we can continue to help you.
If we don't hear back in the next 3 business days, we'll assume you were able to solve your problem and we'll close this case in our tracker. You can always comment back at any time to reopen your question, or you can contact your local FlexSim distributor for phone or email help.
15 People are following this question.