I have set up a model with several AGVs.
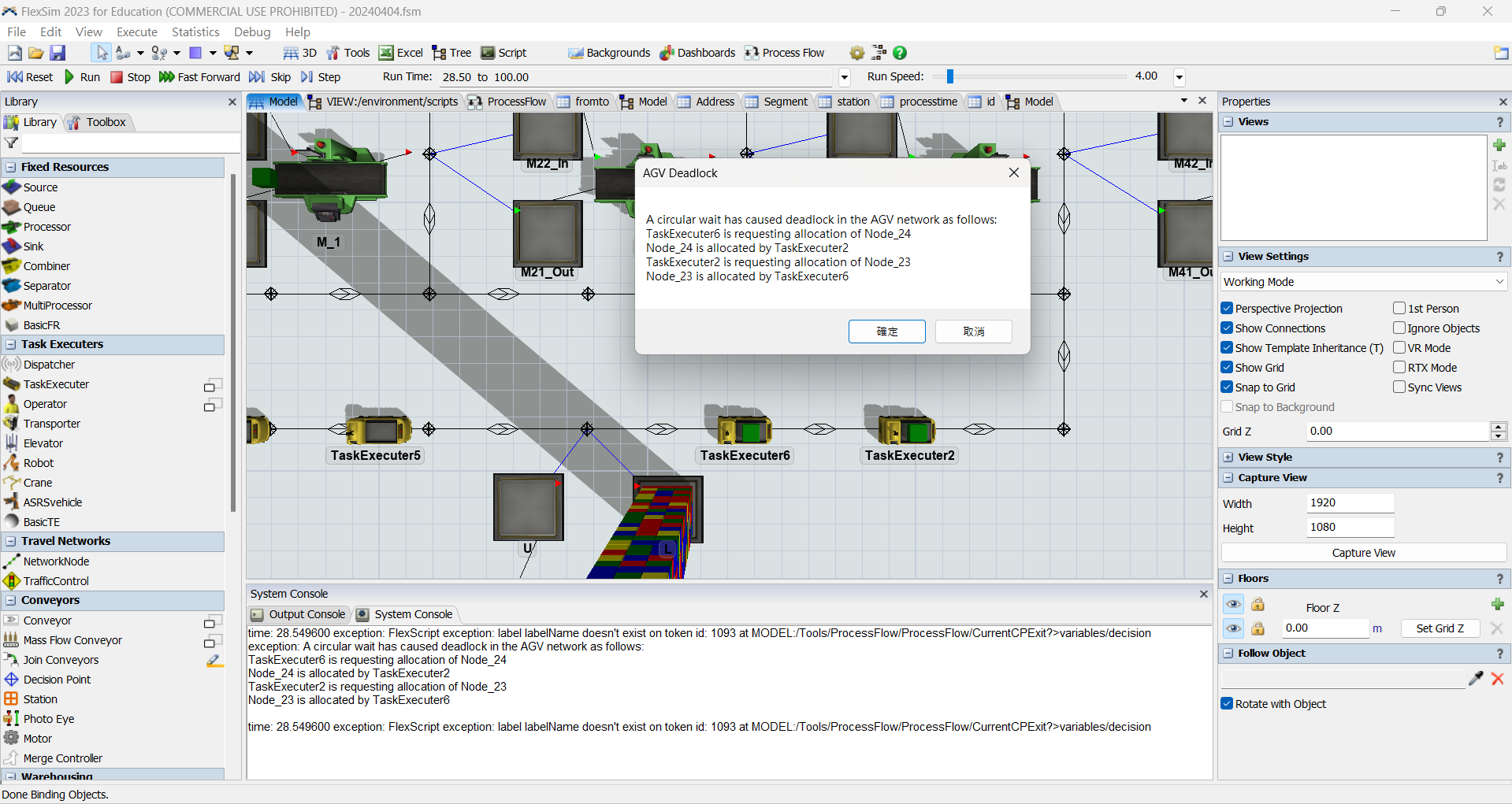
During traveling, two of AGVs will always deadlock on the one road.
In this case, I want to preempt both AGVs to stop at their current control point. Then restore one of the AGVs first (maybe let the AGV move to the next two control points.), and then restore the second AGV after the first restored AGV leaves the area.
So I decided to use Process Flow to accomplish this.
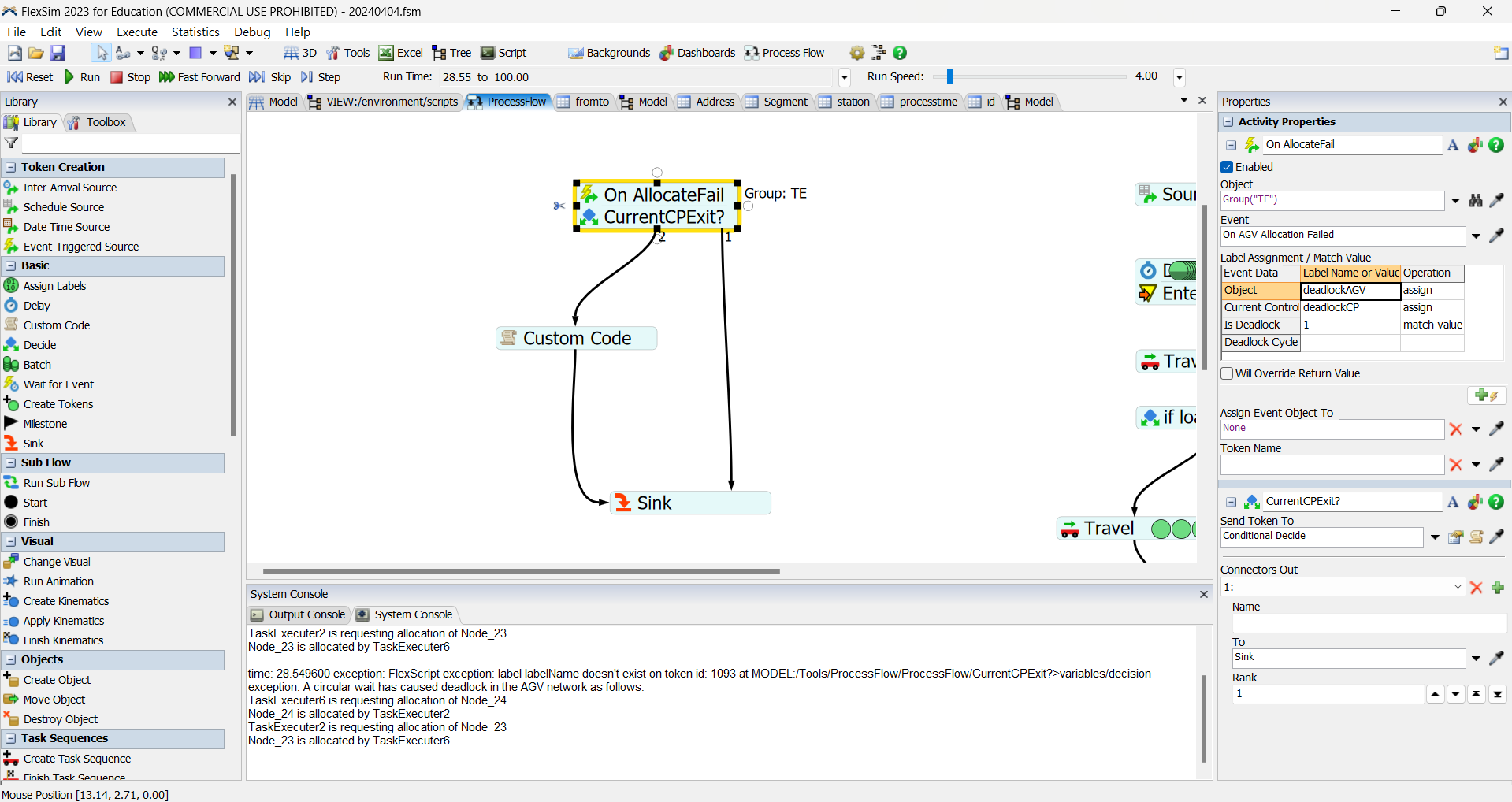
But I don't know how to write my idea into code...
Can anyone help me complete this?