Hi !
I have designed the from-to table so that the AGV can walk as I planned.
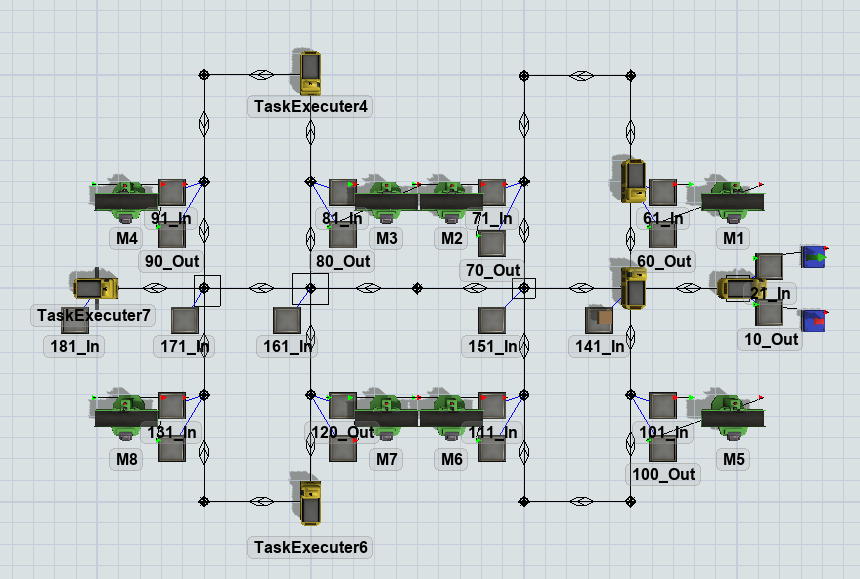
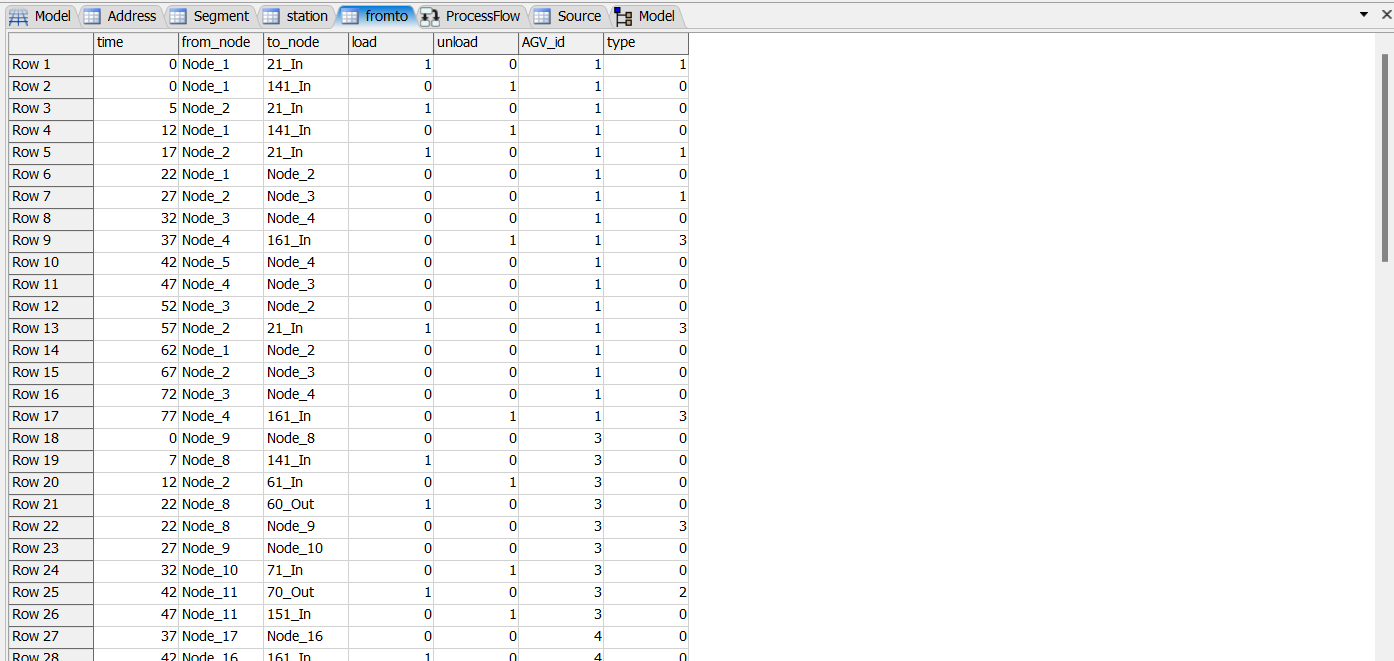
At first, the AGV will load or unload item according to the instructions in the from-to table, but I don’t know why some AGVs will not follow the from-to table (that is, they will not load item).
What’s worse is that the AGV will stop on its own halfway through execution.
I hope the AGV can complete all the processes on the from-to table, but I don't know where the problem is.
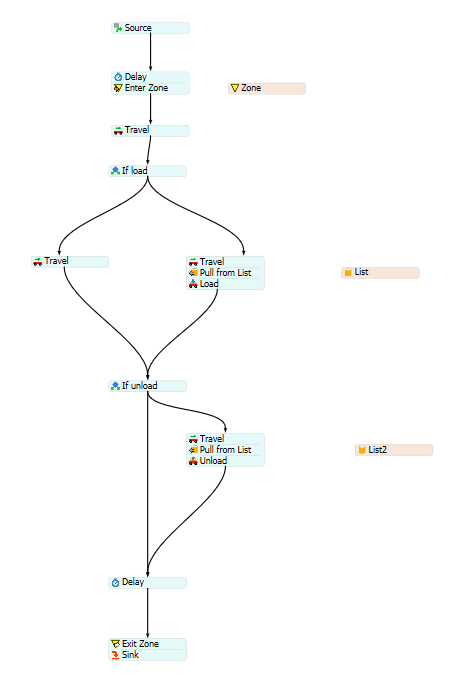
The picture below is the process flow I established
I need someone to help me find the problem.
Thanks in advance.
