Hi.
It's a problem that I haven't been able to solve.
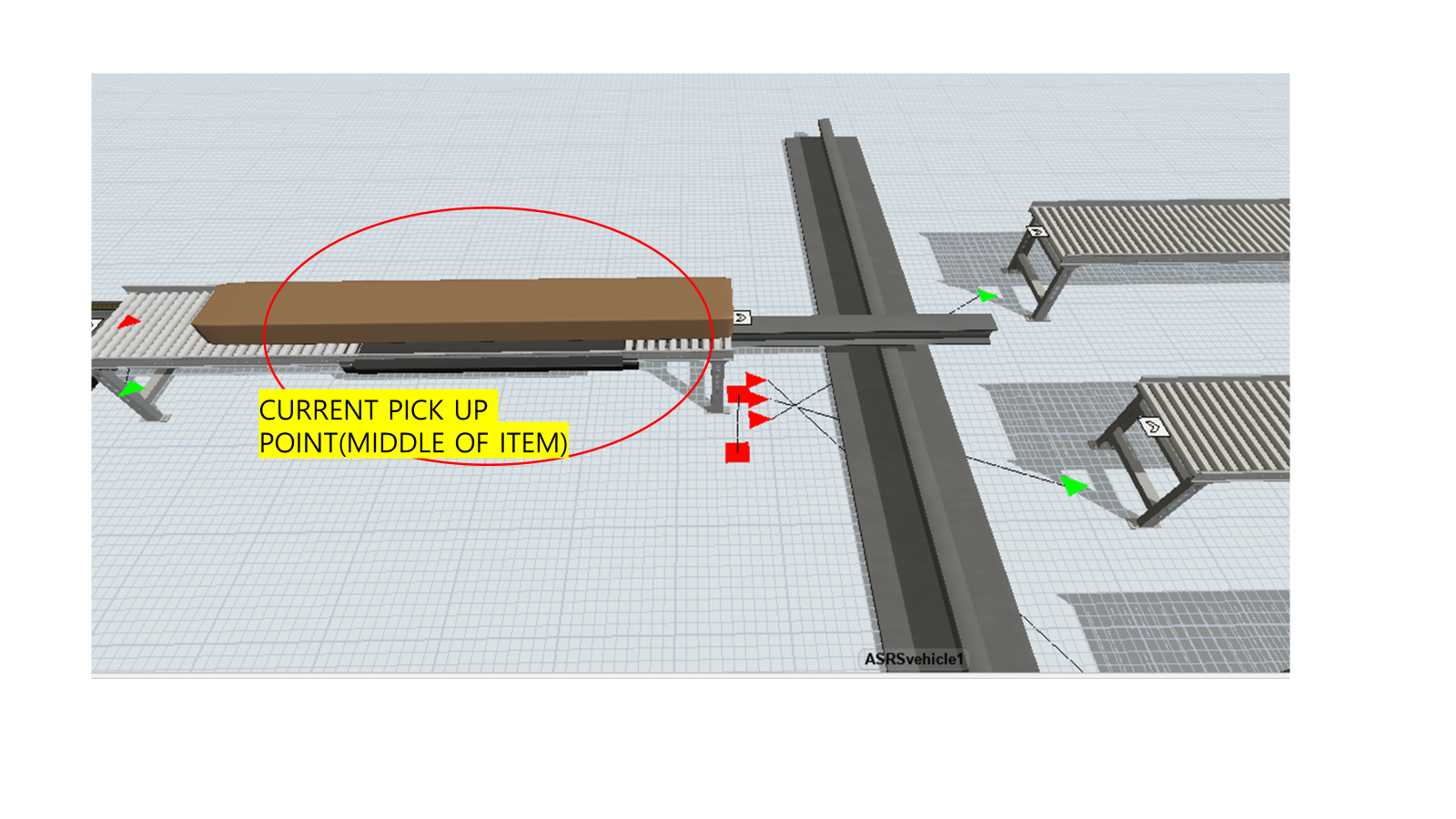
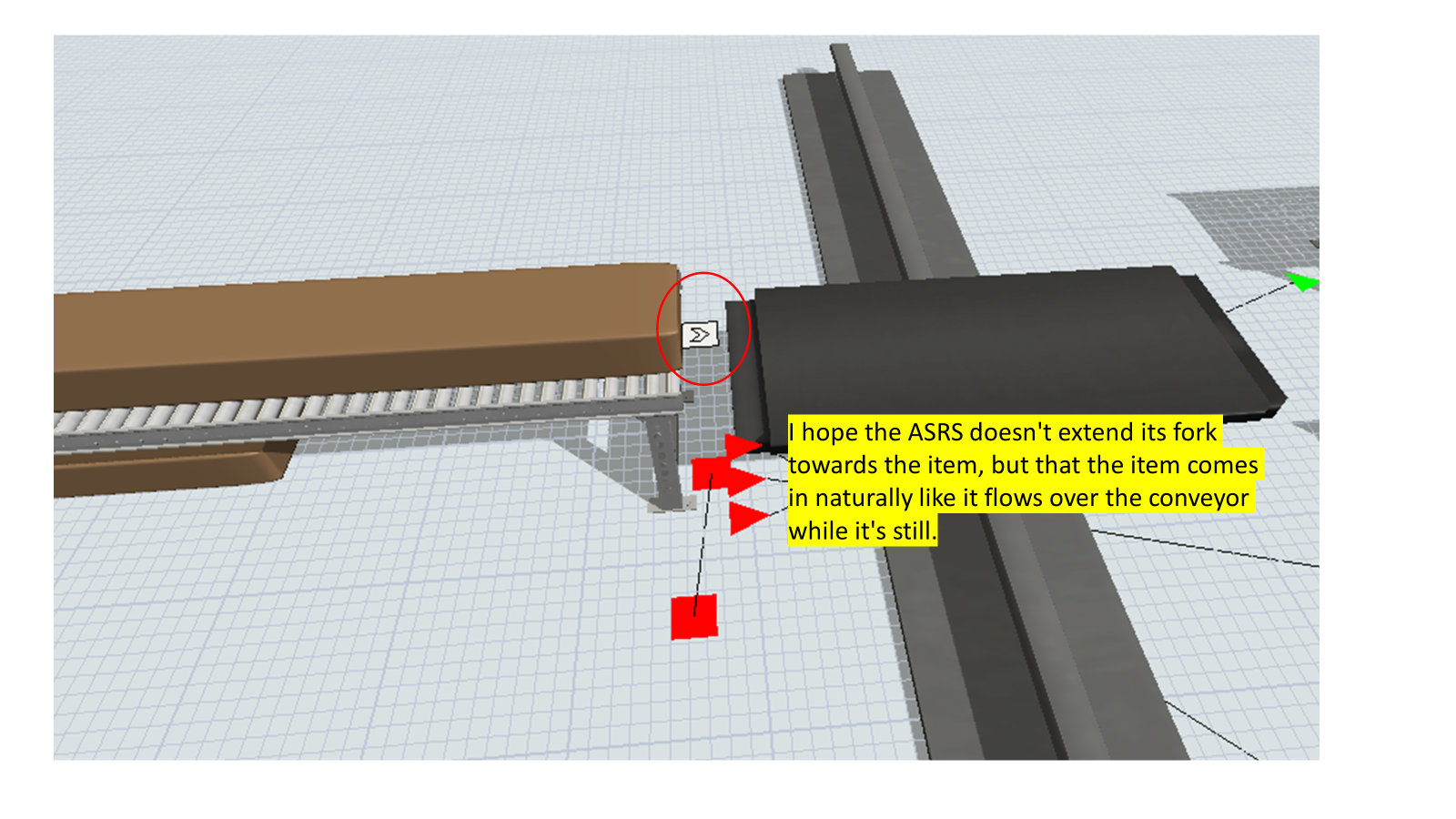
When it arrives at the end of the item conveyor, ASRS stretches out the fork and brings it.
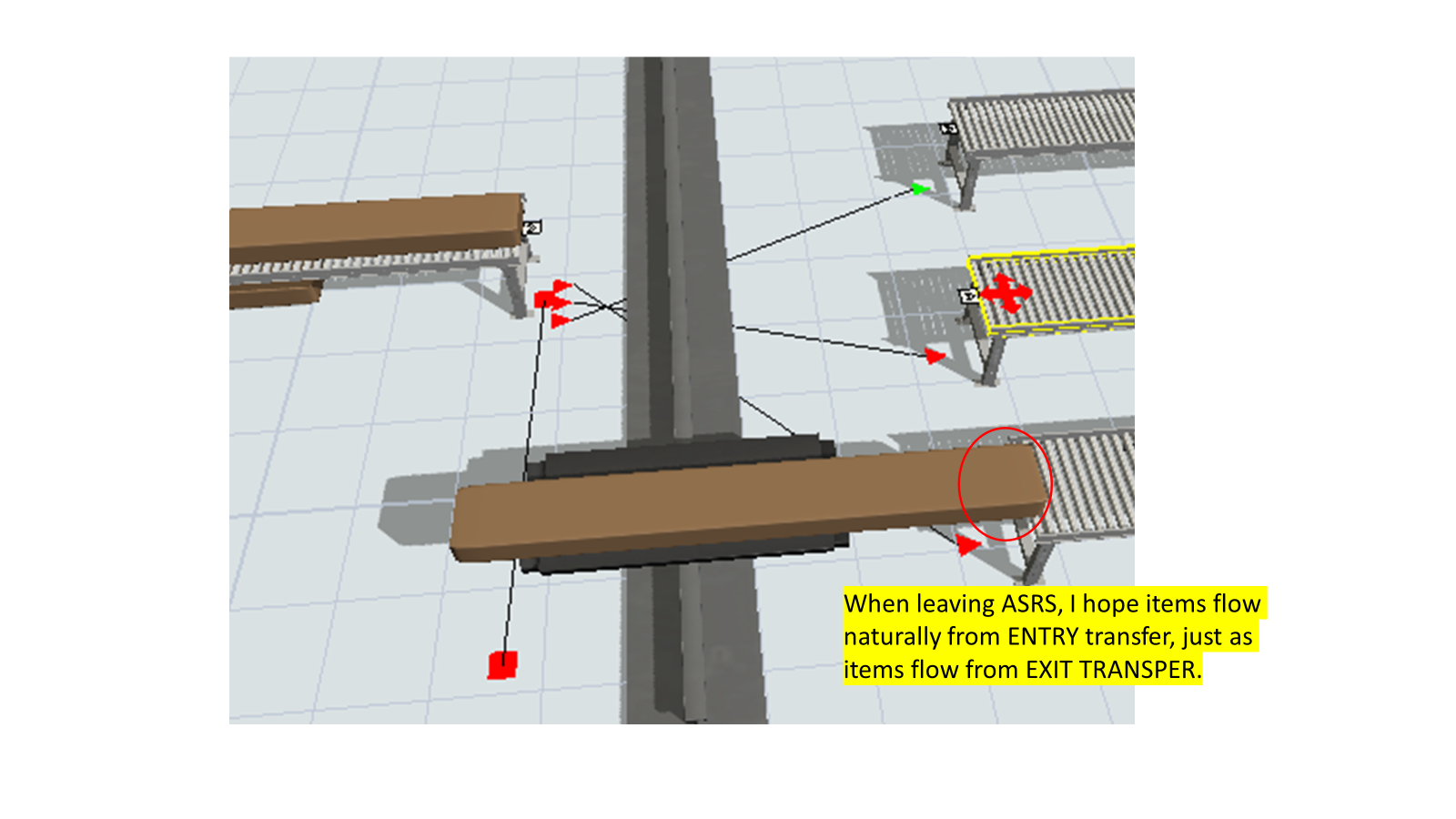
I want the flow of items flowing in naturally, with ARSR not extending the fork.
Is there a way?
Hi.
It's a problem that I haven't been able to solve.
When it arrives at the end of the item conveyor, ASRS stretches out the fork and brings it.
I want the flow of items flowing in naturally, with ARSR not extending the fork.
Is there a way?
Hi @kimsh,
Thank you for contributing to our community! We couldn't identify a maintained license or subscription linked to your account.
You may need to update your profile information to identify yourself as a license owner or their associate. Check out our article for how to ensure you receive timely support. If you update your profile comment back to let us know - we'll adjust the priority of your post accordingly.
If your current license is expired, please contact your local distributor to renew.
This is an offset travel. You can adjust a tasksequence in a way that koordinate movements are limited. Please see my comment in another post recently.
Um... I read it, but I have to put the MOVEOBJECT code before LOAD TASK to control the fork? I don`t know well...
If you mentioned Don't travel, I know the content. However, when I use it, the movement I want does not occur. When using Don't travel or Using, items entering asrs teleport. I don't want teleportation, but I want something that is naturally put into asrs, like a conveyor flow.
you replace an load task by a combination of a pick offset task and then move object task. You must test how far the extender is allowed to travel before a moveobject task teleports the item.
If an internal mechanism prevents such an approach, then you may think about to implement an basic TE asrs, which uses a copy of drawsurrogate node and own customized animations of extender parts.
Since it's a 1-dimensional travel I would not use the ASRS at all. While using a Pick Offset task is possible, if the ASRS is positioned at a non-right angle it will need some math to calculate how far to move along each coordinate. A default task executer on an AGV is much simpler in that regard.
To get a smooth motion of the item there are multiple options. Most likely all of them will be easier to implement when using Process Flow.
1) Placing a conveyor on the TE and moving the item onto that.
2) Using kinematics to move the item.
Wow... that's really great... but the most unfortunate thing is that it's an area that's hard for me to come across...
Still, thank you for always giving me sincere answers and helping me.
I will study about the flow you made for me.
I looked at both models twice,
There are a lot of things I don't understand, but I'll ask you three questions.
1. You added Conveyor to TE, how did you do that? There is an object added in the animation editing, but I can't see Conveyor shape, DP, and TRASPER, do I need to download it?
2. In the PF intermediate code, there is current.as (TaskExecuter).activeTaskSequence.tasks[2].Involved1 and so on, tasks[2] and so on. What does the number mean?
3. The priority is 500 on Create TS, what does this mean?
12 People are following this question.
FlexSim can help you understand and improve any system or process. Transform your existing data into accurate predictions.
FlexSim is a fully 3D simulation software environment. FlexSim can be used to simulate any process in any industry.
FlexSim®, FlexSim Healthcare™, Problem Solved.®, the FlexSim logo, the FlexSim X-mark, and the FlexSim Healthcare logo with stylized Caduceus mark are trademarks of FlexSim Software Products, Inc. All rights reserved.