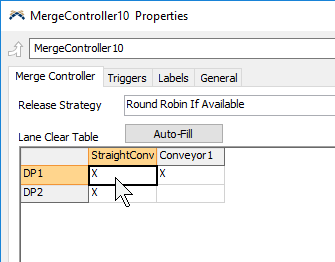
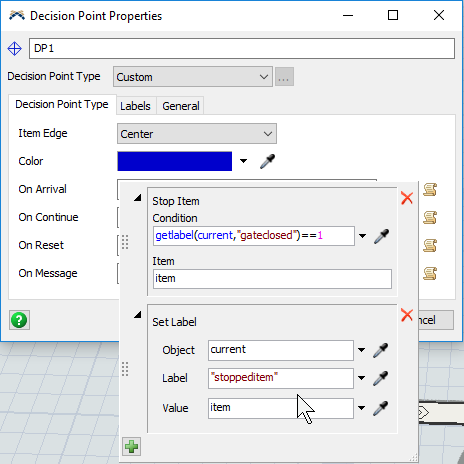
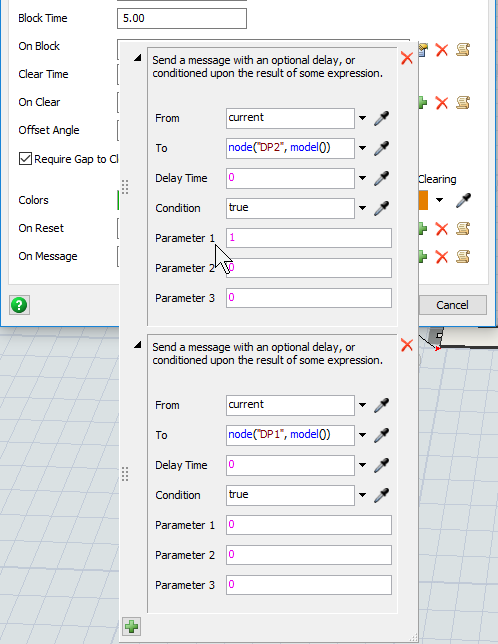
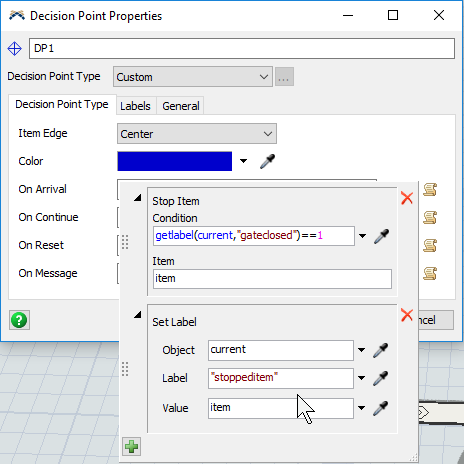
I am trying to stop a conveyor with a photo eye and merge at the same time with the merge controller.
Every time that the condition is met to stop the conveyor the merge controller does not pass the torch to the conveyor that can move and it goes into limbo.

{kind=link}
{kind=link}
{kind=link}