I am working on a material replenishment model that uses AGVs for delivery. I think I have hit a constraint when I add a second Control Point connection to a single queue object. It seems like an AGV is not able to use the second Control Point to drop-off material.
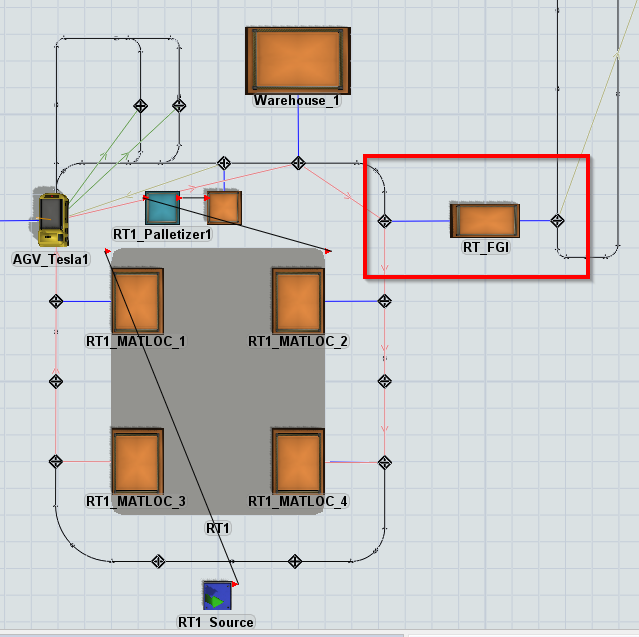
The picture below shows the model scenario. The queue object "RT_FGI" (shown in the red box) is connected to two separate AGV networks. When the control point on the left is connected up second to the queue, the AGV is not able to deliver an item to that queue -- instead it circles the network repeatedly. If I break the connections and connect the left control point first, the deliver works. The overall behavior I am trying to build in this case is for the AGV on the left to deliver items to the RT_FGI queue, and then have a second AGV pick on the right side pick up items and deliver them offscreen on another AGV network.
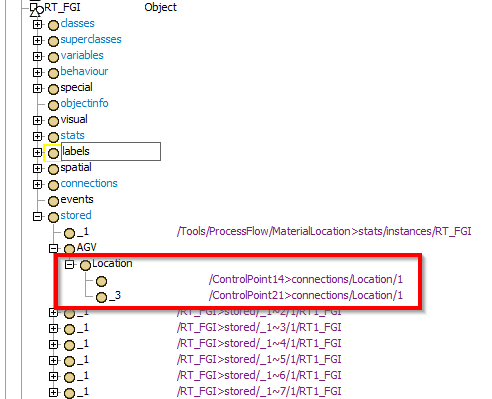
When I look at the /RT_FGI queue object in the model Tree, I see the two control point connections under /RT_FGI>stored/AGV/Location. It seems like the second one is not used in the pick-up and drop-off logic. I'm wondering where this logic is defined -- is it in the AGV Process Flow? I was not able to find "stored" when I searched the AGV process flow in the Tree.