Dear everyone,
For my graduation project I do a research about the possibilities of output analyses/simulations of machines. In this research I use an existing machine which I will simulate in FlexSim. I am really new with flexSim but I try my best. not so long ago I also asked also for help. i hope this time i get the same nice support as the last time!
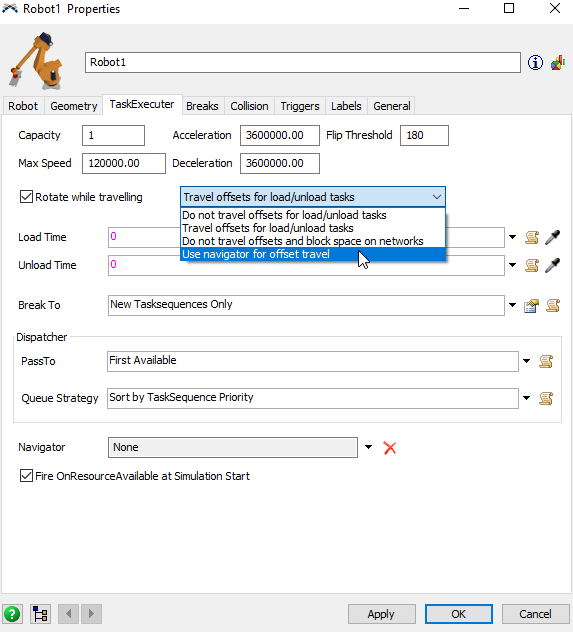
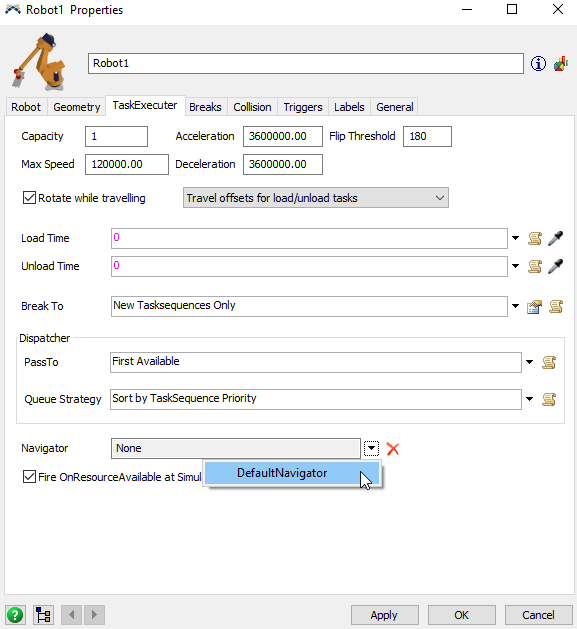
In my model there is a robot that determines a large part of the process. I think that it's possible to indicate this sequence in Process Flow. however I do not know how to do it.
(I made some tutorials but it didn't helped me a lot)
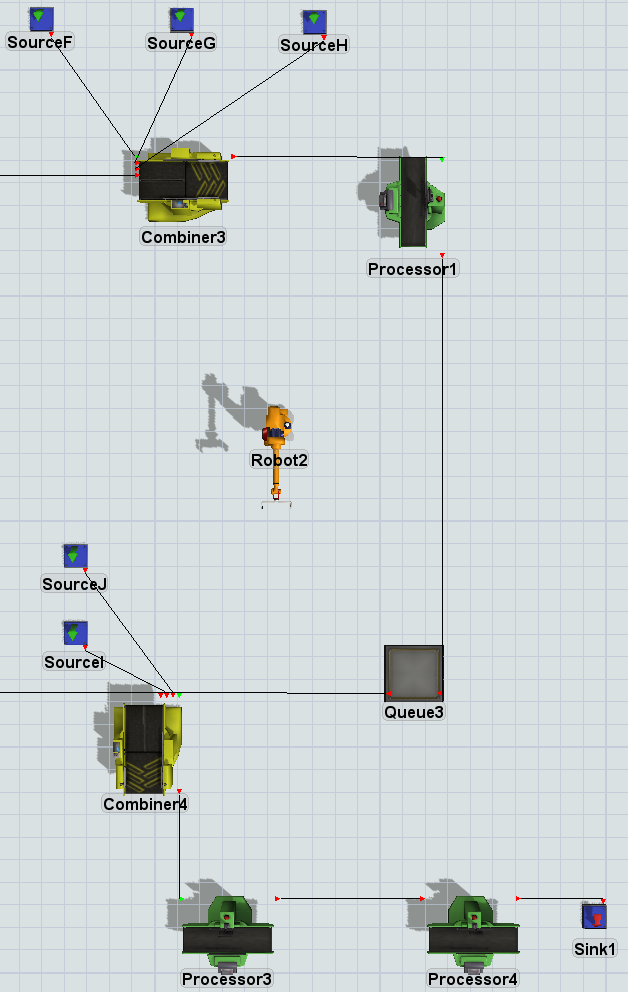
my model is as the picture below:
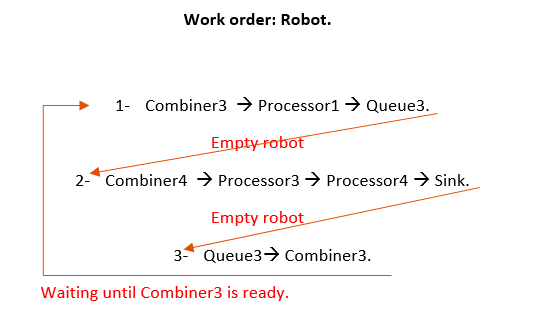
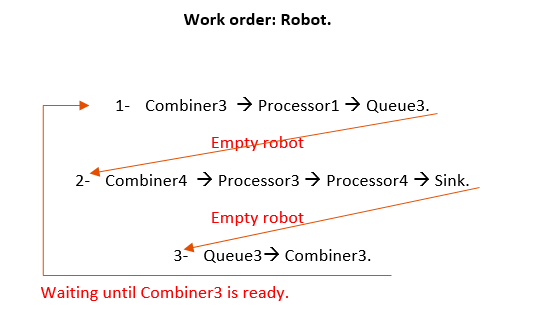
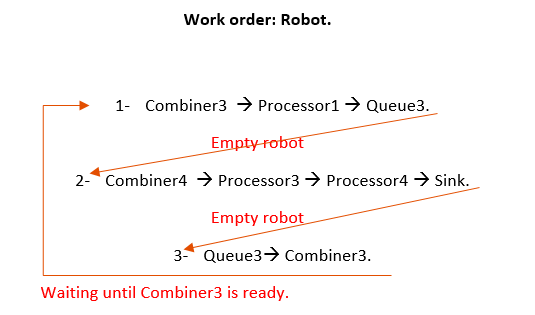
and the work order is as the picture below:
I hope someone can help me.
Best regards,
Remco Witting
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}