Hi
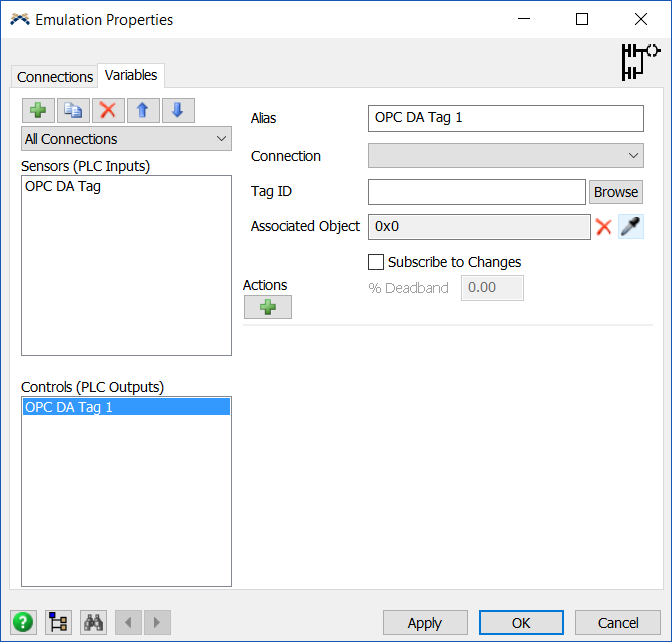
I have started to take a look UI of the Variable in the new emulation feature. I am not sure if my perspective is wrong. I feel that the content of PLC Input (Sensor) and PLC Ouput (Control) should be reversed.
When a model receive a data from sensor (PLC Input), it should trigger an action in the model. Such as Send Message.
On the other hand, when the model send a value to PLC because a photo-eye is on covered; this should be the Output to the PLC. Based on the value, PLC will trigger an output to its control device such as pneumatic cylinder.
Any comment from others?
David
