As in the model attached I want the Robot2 & Robot3 to act as operator when the processor1 is processing. And also want to have a condition on operator1 as only when TT is empty unload the parts.
Thanks in advance!!
As in the model attached I want the Robot2 & Robot3 to act as operator when the processor1 is processing. And also want to have a condition on operator1 as only when TT is empty unload the parts.
Thanks in advance!!
Hi @Suhas H2,
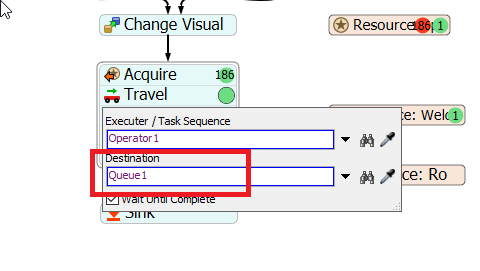
I have a couple suggestions. The first is unrelated to the robots, but simply to help collect accurate data. In your model, you had your operator traveling to Queue1 every time they collected an item. Perhaps this was intentional, but what means is that when your operator is assigned to Load an item from Queue2, he will still walk to Queue1 before doing so, which adds unnecessary operating time (in my opinion) to your data. My suggestion is to eliminate the Travel activity and choose "Item Container" as the Station in the Load activity.
Okay, now on to the robots...
Robots don't like to Travel like normal Operators or Task Executors. The best way I've found to manipulate them is to use "Travel to Loc" activities in Process Flow. This requires a couple of things:
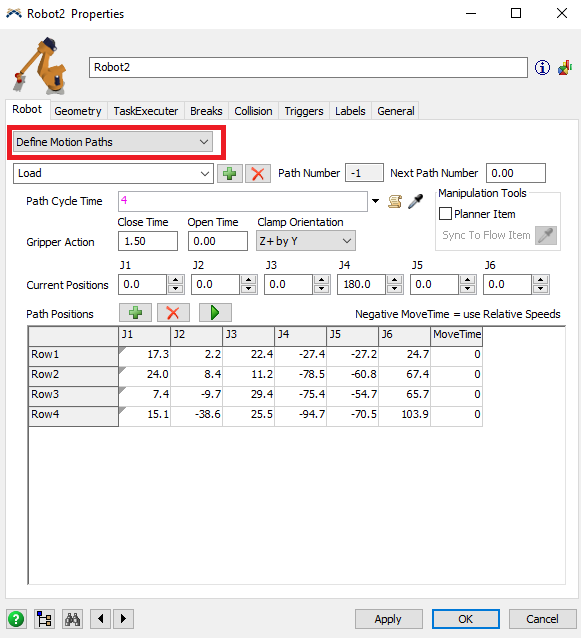
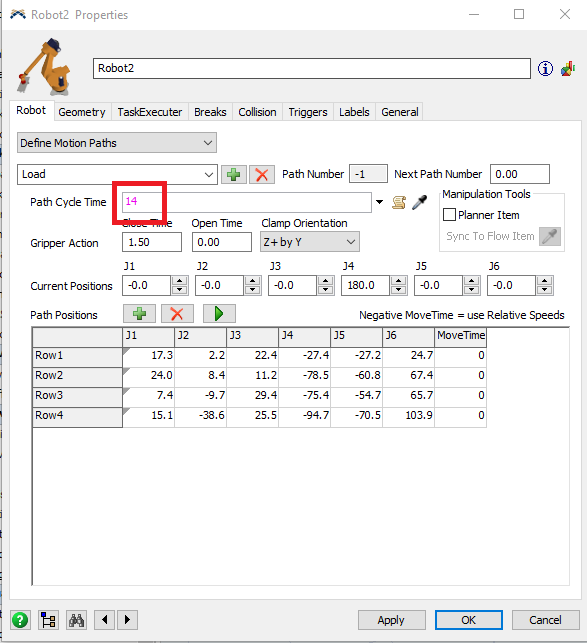
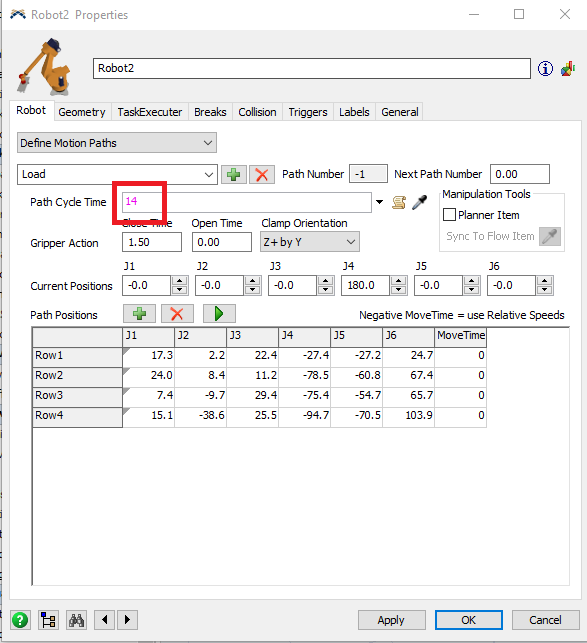
First, in the "Robot" tab of the robot properties window, select "Define Motion Paths" from the pick list. Then, use a planner item to define the geometry of where the robot needs to move. There's entire tutorials written about this, so let me know if you need me to point you to those or if you have other questions...
Second, I acquired both robots separately, so they can each travel to their own unique location and you can control whether they move simultaneously or in sequence. This can be seen in the Process Flow here:
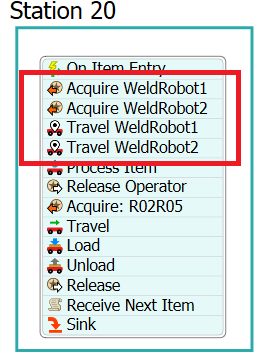
You can define exact X, Y, and Z locations, but for the purpose of this example, I used the Processor1 as a reference. The robot will travel to the nearest location based on its defined motion paths.
Now, your robots should be "operating" while the item is processing. You can work to optimize the visuals once you get the hang of it, but I will admit it takes some time to get perfect. We're hoping to improve robot functionality in the near future.
Here's your updated model with the changes I've mentioned, including removing the Travel activity:
9 People are following this question.
FlexSim can help you understand and improve any system or process. Transform your existing data into accurate predictions.
FlexSim is a fully 3D simulation software environment. FlexSim can be used to simulate any process in any industry.
FlexSim®, FlexSim Healthcare™, Problem Solved.®, the FlexSim logo, the FlexSim X-mark, and the FlexSim Healthcare logo with stylized Caduceus mark are trademarks of FlexSim Software Products, Inc. All rights reserved.

{kind=link}
{kind=link}
{kind=link}