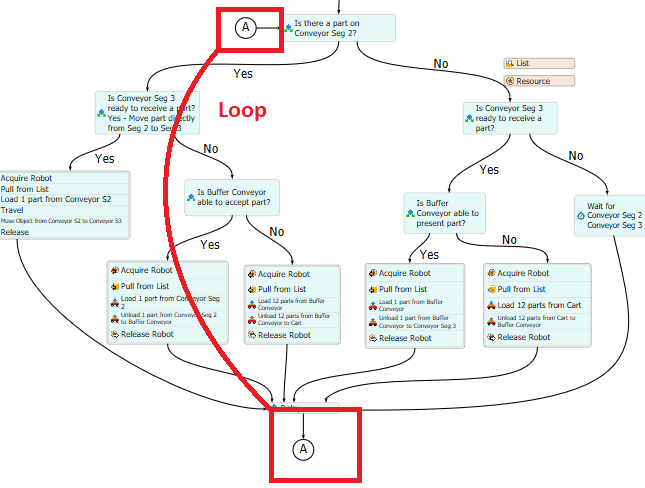
I would like to simulate the following scenario:
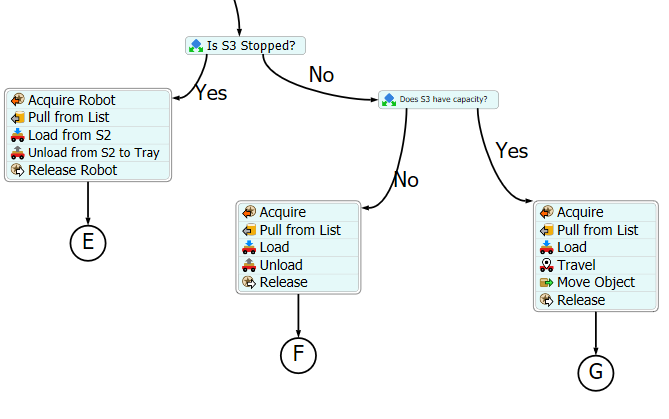
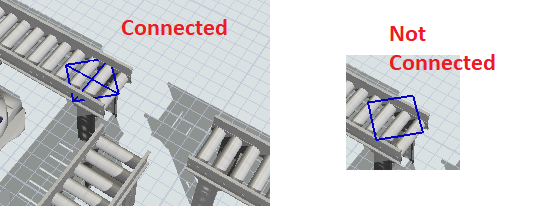
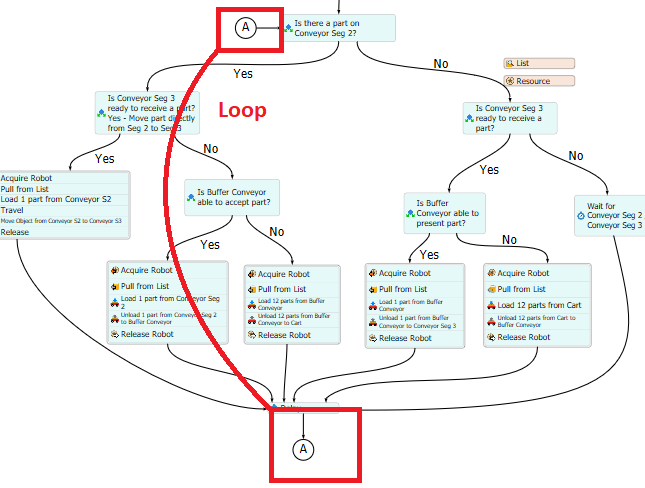
When S2 is running and S3 is running as well, the blue buffer is bypassed and pieces go from conveyor to processor (S3).
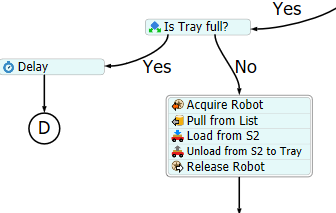
When S2 is running and S3 is down, the robot would populate the blue tray.
When S2 is down and S3 is running, the robot would use the pieces of the tray so S3 is not starved.
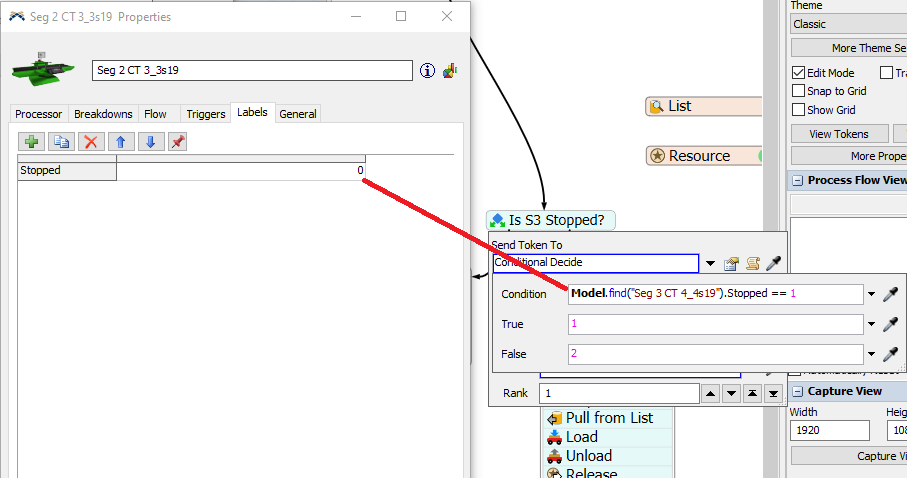
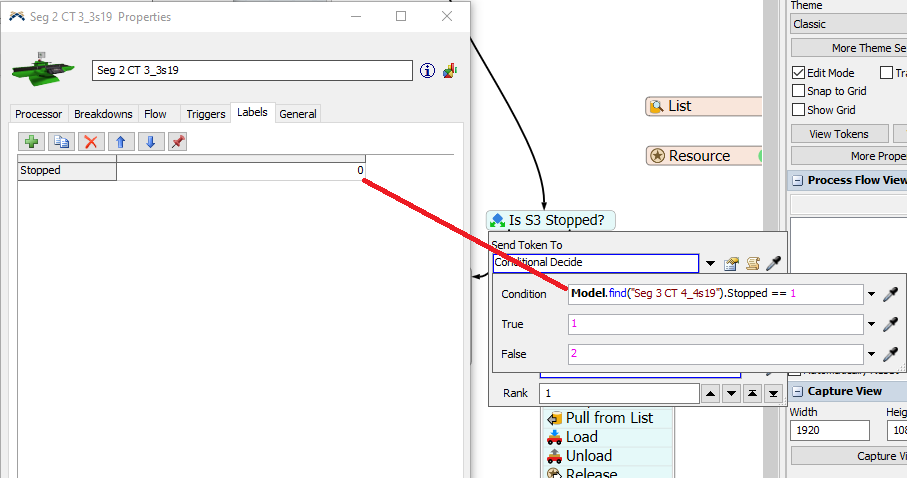
I cannot make my robot use the blue tray though. Nor populate it when S3 is down. I used time tables in order to have them down at different times and see the logic work easily.
Thanks!

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}