Unfortunately, I have a problem in understanding to use waypoints and LFNW points. In the model enclosed I have arranged the AGV parking position in an inner circle. Tow problems appears.
1.How can I manage that the AGV´s don´t block each other? If the first AGV get an order the second AGV have to drive in the first position (parking position have to change). And a new order to a free AGV (a AGV on a parking position) have to go to the AGV on the first parking position!
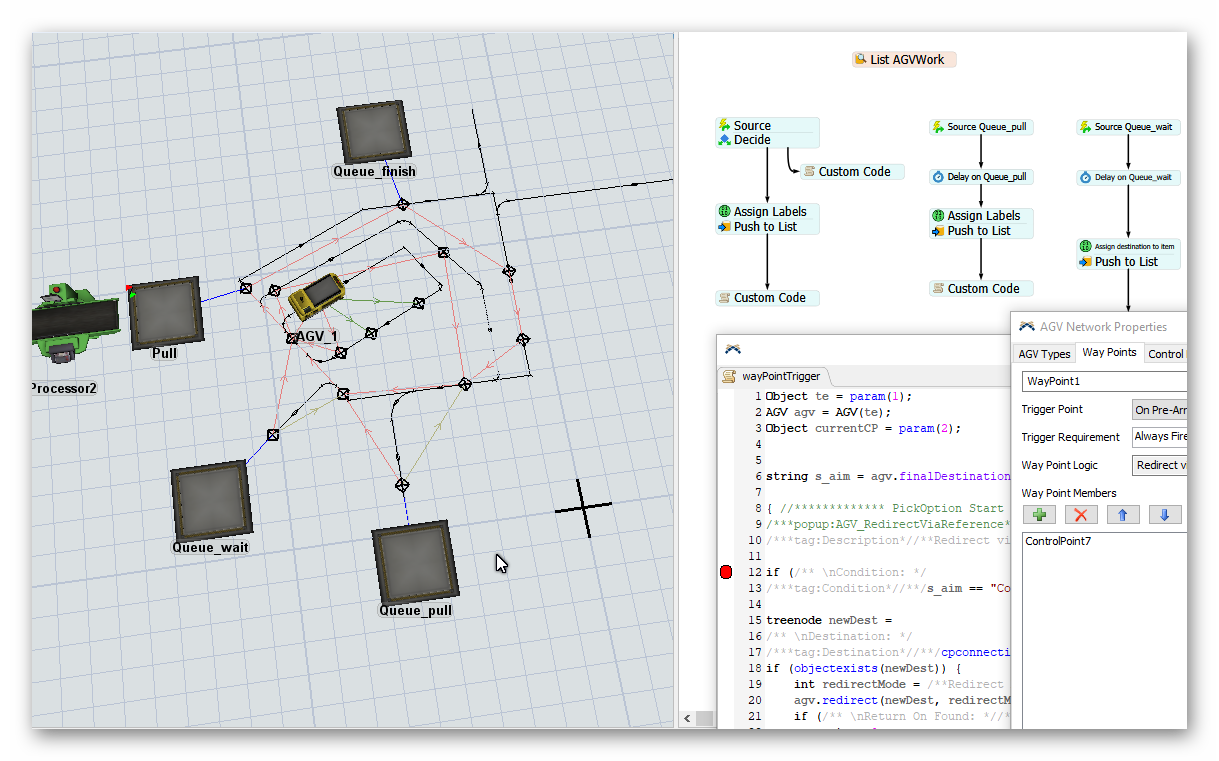
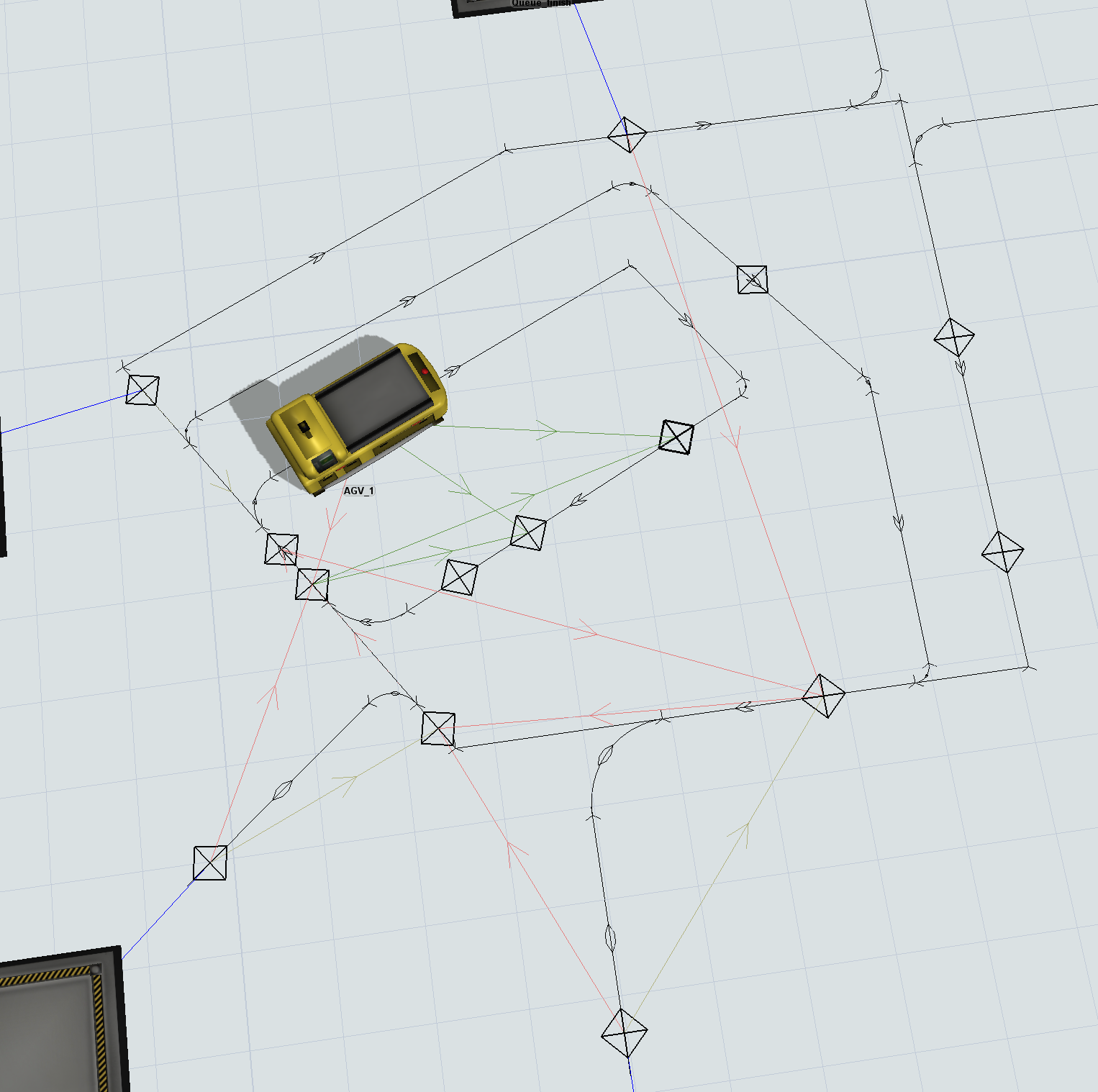
2.And I don´t know how I can manage that AGV with the order to put items from Queue_pull to Queue_wait and orders from Queue_wait to Queue_finish take the second inner circle. I tried this with a waypoint on AGV network properties, but no change. The AGV´s work off one after the other “Lock for next Work Point” on ControlPoint7.
How can I solve the problems?
Thanks in advanced

{kind=link}