Curerently FlexSim can only model singulated package flow conveyor. Now days most of the warehouses use bulk conveyor alongwith other automation. So solution to model Bulk flow conveyor for cartons is critical. Any recommendation or solutions?
How to model Bulk package Flow conveyor in FlexSim?
FlexSim 19.1.0
How you simulate a bulk conveyor depends on the type of system, and what your simulation output/input needs are. If you're doing something like a mass flow system (https://www.nerconconveyors.com/Nercon/Applications/Carton-Handling.htm), similar to what you would see in a bottling system, then I would suggest using our bottling library.
There are also bulk conveyors:
https://intecsolutionsusa.com/preform-systems/bulk-conveyor/
And singulators:
https://www.youtube.com/watch?v=8eDSvW9V2LU
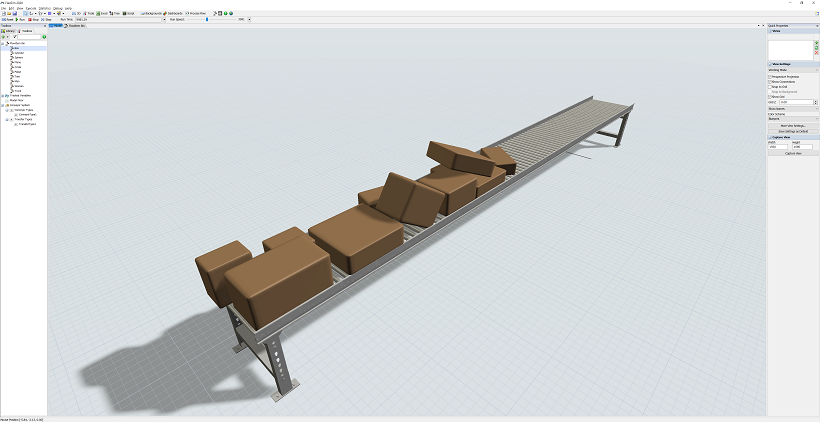
The problem with trying to simulate these to a high degree of detail is that the behavior of the parts on the conveyor is dependent on physical interactions between the parts, and the only way to really simulate that to a high degree of detail is by using physics simulation. FlexSim does not include a physics simulator, and even if it did, using one would grind your run speed to a halt. That said, if you really need it to look right visually, and you want to just look at one or two bulk conveyors together, we've had an employee here build a singulator simulation in Unity, with its physics engine, so you could go that route. However, if you want to integrate a bulk conveyor into a larger system, then you should really think about making simplifying assumptions. If you were to think of the bulk conveyor was a "black box" that's integrated within your system, what are the things you absolutely need as far as inputs/outputs from the conveyor? Do you just need more space "horizontally" so you can put more items through given the speed of the conveyor. This could be solved with a standard conveyor by making an item's entry/moving/stopping space less than its physical space. It's still just a fifo conveyor, you're just allowing more items to go through it because they can overlap each other. I've attached a model that includes this mechanism, and moves the items horizontally to make them not actually overlap. Note that the non-overlapping only works when items are the same size, but, again, what are the simplifying assumptions you can make? Could you make this simplifying assumption even for different sized boxes, just assuming an "average" size of cartons? What is it you really need from the simulation, statistically?
Also, depending on the simplifying assumptions you're willing to make, I would also suggest perhaps looking at the bottling library. It essentially works similar to my sample using a standard conveyor.

Also included is an example that simulates a similar scenario, but with randomly sized and rotated boxes. Given the simplifying assumptions, boxes may overlap. However, it is nevertheless a reasonably good animation of what a singulator might look like.

@anthony.johnson, any chance you could update your post above?
There is a bug on Answers (which we reported to them 3 weeks ago but they have yet to fix) where if you edit a post, it loses any images and attachments. Your post above is missing the images, I presume since you edited the post yesterday.
If you see the images, it is only because you have them cached. If you visit in a new browser or private session, you'll see they are missing.
When you edit this post to fix it, you'll need to re-add not only the images, but the model attachment as well, so that its link doesn't break as a result of the latest edit.

I think I may have an idea of what @Ganesh N is asking (and if I'm wrong, this is still something that I would love to see). IIUC it's not so much about cartons that get beside each other or spin or bridge (which is where you get into the physics), it's more in how they actually restart after accumulating.
For package conveyors, FlexSim does a good job of modeling zoned accumulation (aka non-contact or singulating), (by setting entry, moving, and stopping spaces all to 0 x item length +<zone length>). And it does fine at modeling gravity conveyor ((by setting entry, moving, and stopping spaces all to 1 x item length +0).
But it is now very common to have a conveyor that lets cartons bump up against each other to accumulate, but restarts by fixed-length zones -- where each zone may have multiple cartons in it when it restarts. In other words, the conveyor doesn't singulate cartons -- it lets them bump together -- but it also doesn't start all cartons on the conveyor at once when space is available downstream. In effect, it singulates (e.g.) 30" groups of cartons, except cartons exit the conveyor individually at the downstream end.
Currently I just use Accumulating with a Stopping space of 1 x item + 0 and Moving space of 0 x item + <an empirical number shorter than the physical zone>. It gets close for *most* analyses but it really doesn't look quite right which my conveyor guys notice right away and I then have to explain. (Not great for model credibility!) I'd love to see you add this kind of conveyor behavior, and it shouldn't require a physics engine.
Here is another example of pallets being packed on conveyors. I am not exactly sure what you mean by bulk flow or cartons that doesn't fall into these 2 models. We have even done models that pack totes and boxes based on size of flow items. Could you give us an example?
18 People are following this question.