Hi @anthony.johnson,
I have tried some different things with the agent module, which work pretty well.
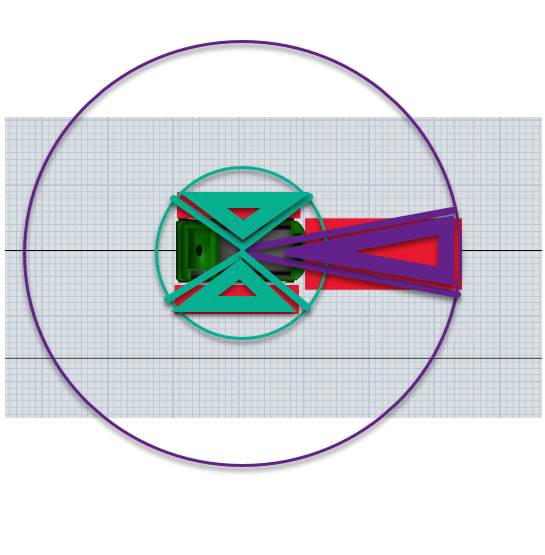
One of our customers (an AGV supplier) is also really interested in this new module. The main thing for them is to use it for their safety field on the AGVs. These sensors on the AGV only look in 1 direction. A person might for example also only be looking ahead and not back. For their AGV the situation is actually as shown in the picture below. The AGV has 3 fields around it with the one looking to the front being the most important one.
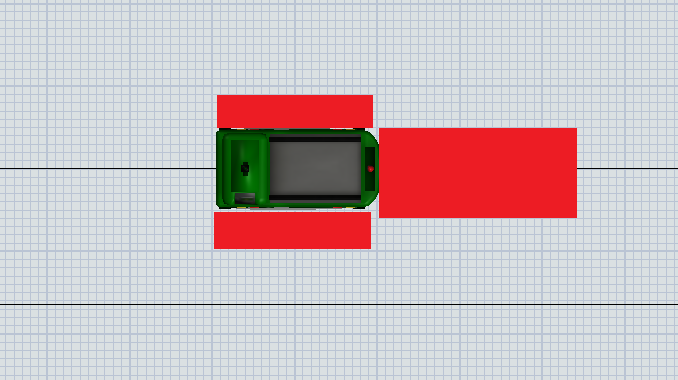 When something, like another AGV, is in one of the red boxes the AGV should slow down a bit. I tried to make the sensor that looks ahead in the attached example model. This seems to be working well for the slowing down part. Although I only look at the corner points of the neighbor of the AGV. It is of course possible that the neighbor is in the safety field, but none of the corners are. Those cases still go wrong in my example. This would require a few extra checks.
When something, like another AGV, is in one of the red boxes the AGV should slow down a bit. I tried to make the sensor that looks ahead in the attached example model. This seems to be working well for the slowing down part. Although I only look at the corner points of the neighbor of the AGV. It is of course possible that the neighbor is in the safety field, but none of the corners are. Those cases still go wrong in my example. This would require a few extra checks.
The problem with starting to drive on normal speed is that this happens when the AGV leaves the proximity, which is still a circle. I would like the AGV to speed up again when there are no objects anymore in the red rectangles, but the neighbor can in this case still be in the proximity circle). Is this possible, or should I use something else in this case?
For the agent module it would be really nice (if possible) if we could change the shape of the proximity field, although this might be quite difficult. If it is possible it would be great if there is an option in the GUI for this.
Patrick