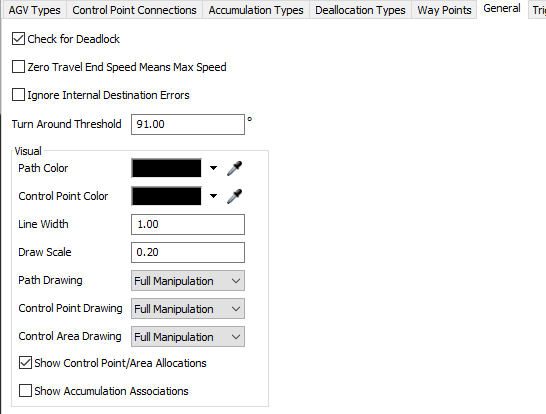
I want to know if there are any functional modules in process flow that can realize that when an AGV trolley is driving in a section, its departure control point is set to the occupied state (so that it can not be occupied by the next AGV)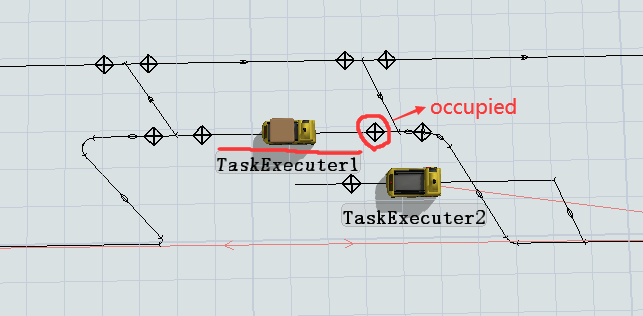
Thank you very much!
{kind=link}