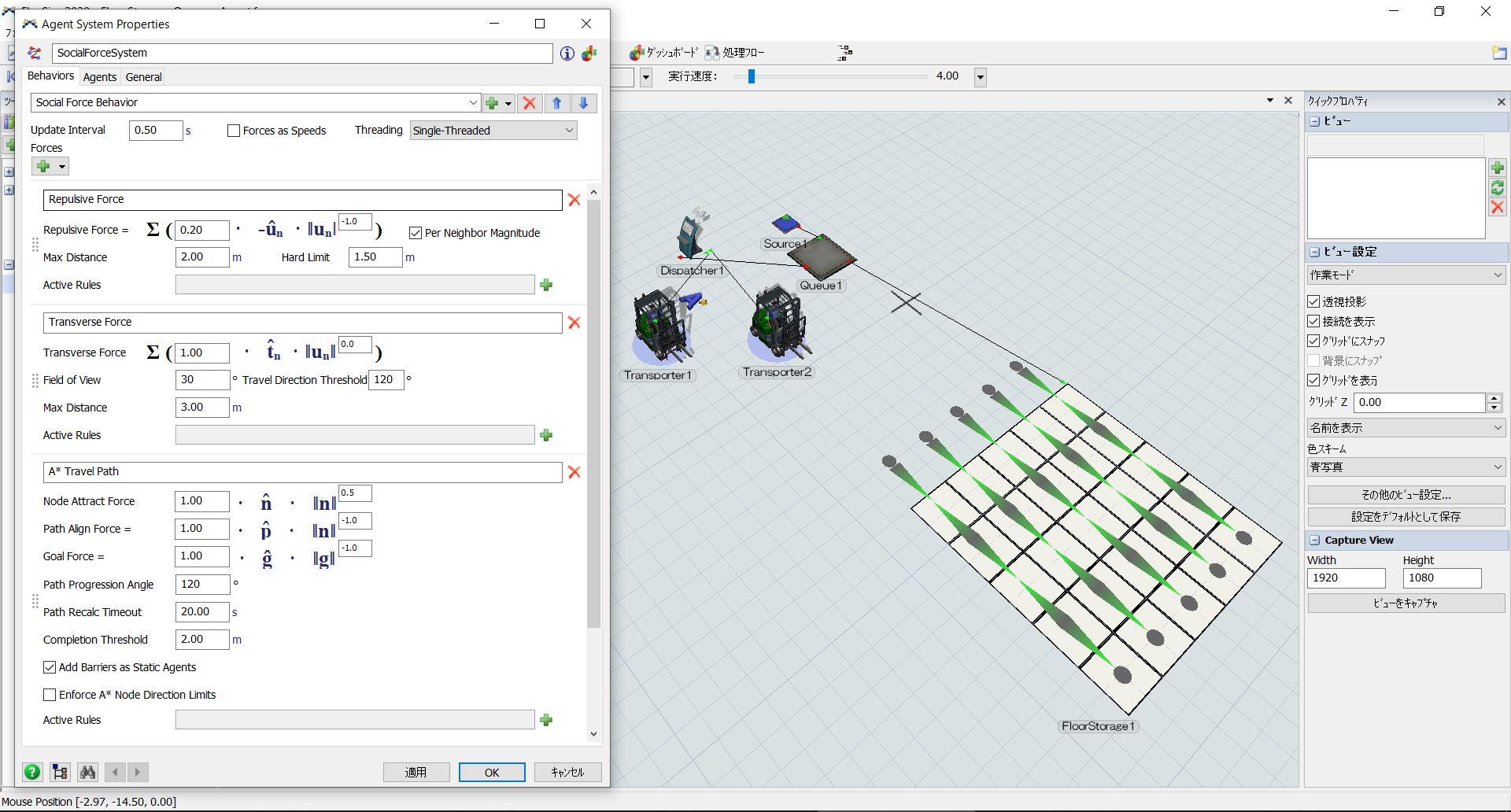
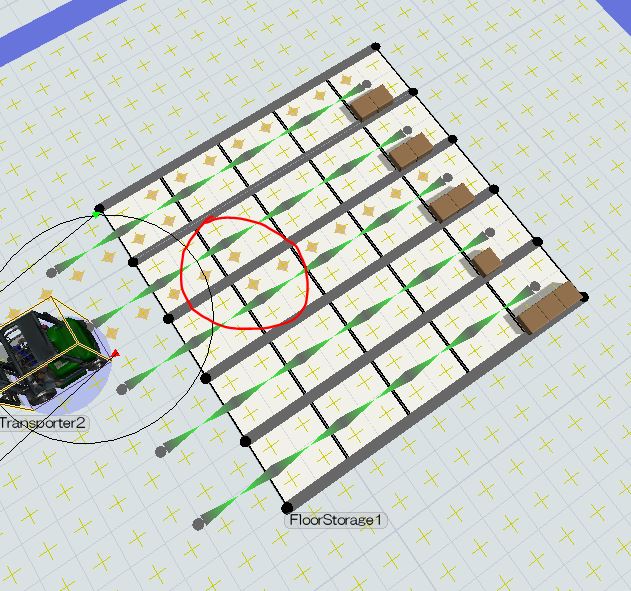
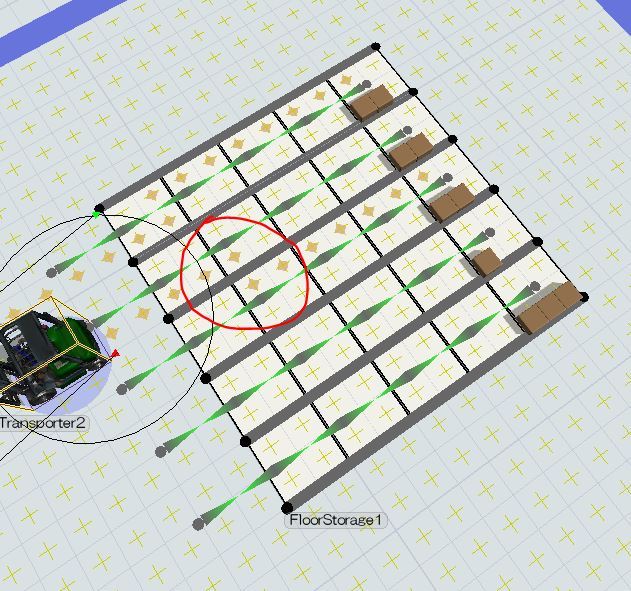
I have two forks controlled with A* and I want to keep the distance of the forks in 3 meters if it gets close. I plan to use the Agent, however when I do that, the fork keeps going around the target slot and never arrives at target position. How do I set in this case? Do I use proximity?

{kind=link}