Hi,
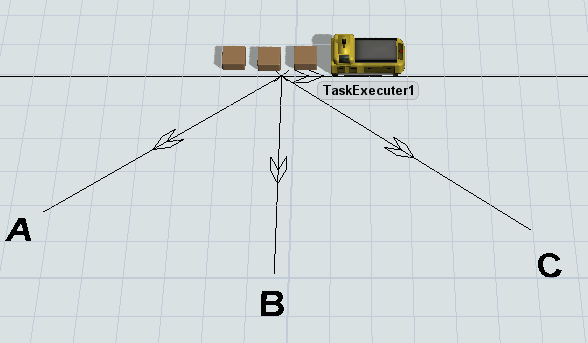
Attached is a simple example model that shows the question. A little train is created that travel to a control point, stays there for a small delay and then needs to travel to the next control point. The problem is that the AGV network can’t find the route to the next control point.
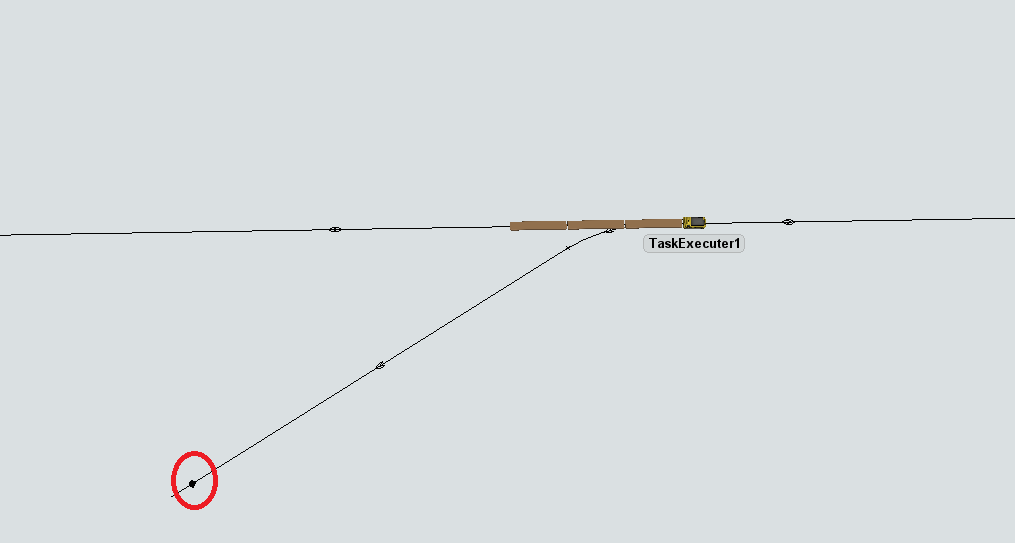
The picture shows the position of the train when it is waiting at the first control point.
The red circled control point shows the final destination of the train. This means that the train should travel a little further to the right and then travel back and take the other path.
Is this something the AGV network should and could do automatically? Or should the user make extra logic to make this kind of models working?
Note that if you move the first control point further to the right, such that the train has completely passed the intersection when it stops everything works fine.
Also note that this exact same model was running in 2020, although the wagons make a small jump there. In 2021.1 the model behaves the same as in 2021.0.
Thank you for your time.
Patrick