Hello,
As other topics suggested, stop for turns AGV should use AStar instead of AGVNetwork, but I have no clue how to build traffic control in AStar.
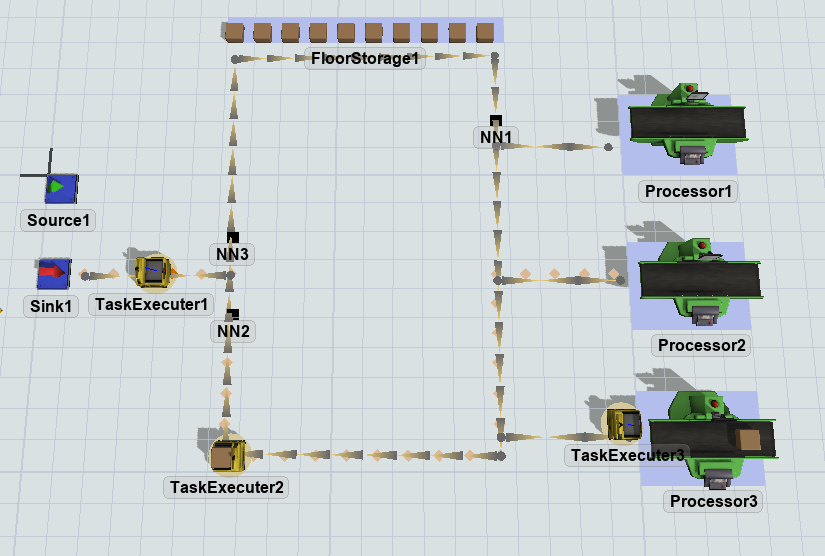
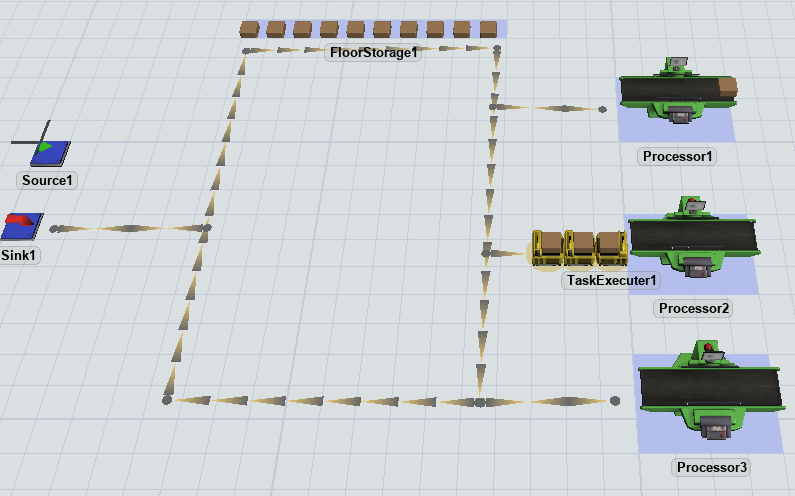
In the sample model, each processors has two-way mandatory path, how to decide if those paths has AGV occupying, how to define a wait point if those paths occuppied.
agv_crossroad_rotation_astar_v22.1.fsm
In the other hand, abandon AGVNetwork also abandon its strength on traffic control, recharging, path speed. So I also tried other solutions.
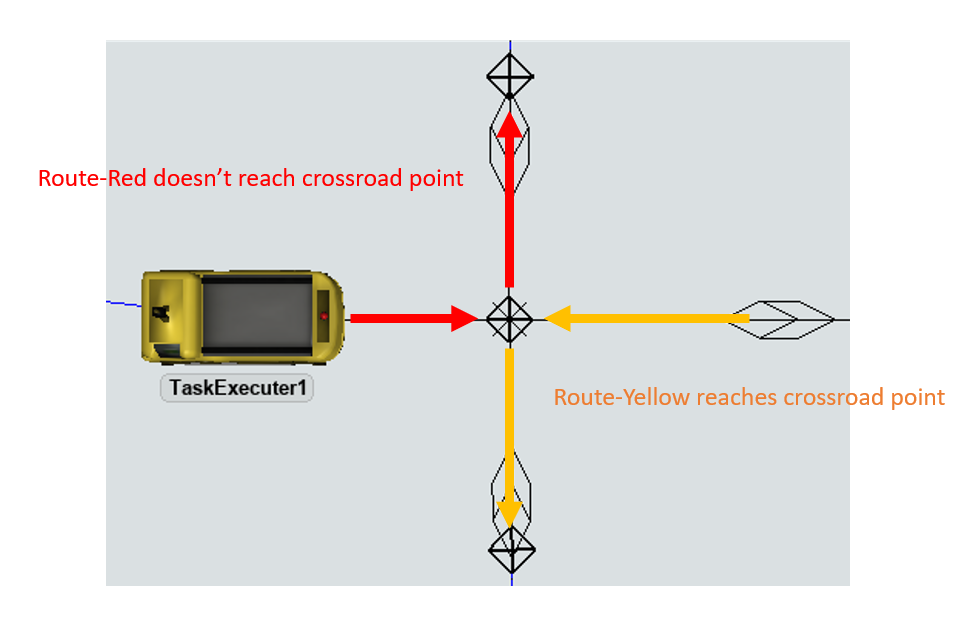
Attached model from this topic places a control point for turn, but the turn point may not be triggered if the turn point at four-sides crossroad and the control point does not place at perfect position.
Making AGV stop and rotate at the AGVPath Crossing - FlexSim Community