Hello,
Is there a way only for visual reasons the 4 counterbalances that i have, not to step on each other while excecute the load-unload tasks?
Hello,
Is there a way only for visual reasons the 4 counterbalances that i have, not to step on each other while excecute the load-unload tasks?
Hey @Maria A31, currently there's no built-in way for task executers to avoid collisions while doing offset travel to load/unload items. They will try to avoid each other in A-Star if they're on the network, but it seems your larger operators are on their own system. There's a few options you can try to help the 3D model avoid collisions.
One option is to have a separate queue for each operator (in your case, you'll have 4 separate queues). You can use a dispatcher assign pickup/drop-off for each operator so if one queue is more busy than others they won't idle. You can try attaching them to the A-Star system so they can avoid each other while travelling.
Another option is to restrict the number of operators that can load from the queue. By wrapping the Load Task with an Acquire and Release activity, only 1 operator can load at a time. This will bottleneck performance though. Something similar to this would be to put barriers around the queues so then operators can only load/unload from certain locations.
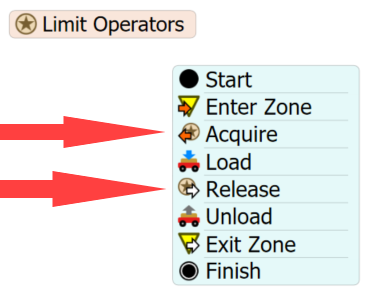
Here's the documentation on dividers and barriers in A* navigation.
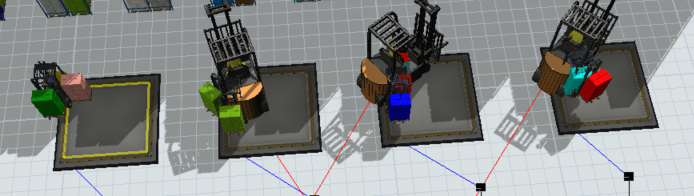
I made some small changes to show how the 4 different queues could operate. All I did was add the queues and change this table you had that specified the Buffer to drop off to.
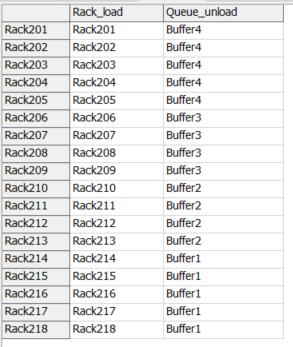
And it turned out like this:
if I have to deal with this I restrict the numbers of transporters at a network node. Then when a transporter is going into an offset travel he is alone on the way to a rack or inside of a queue. I must tell him to leave this area by giving him a destination after unloading.
You have chosen to let transport to drive from 4 network nodes, then this approach hasn't got any success. This works only, if you let them start from only one network node.
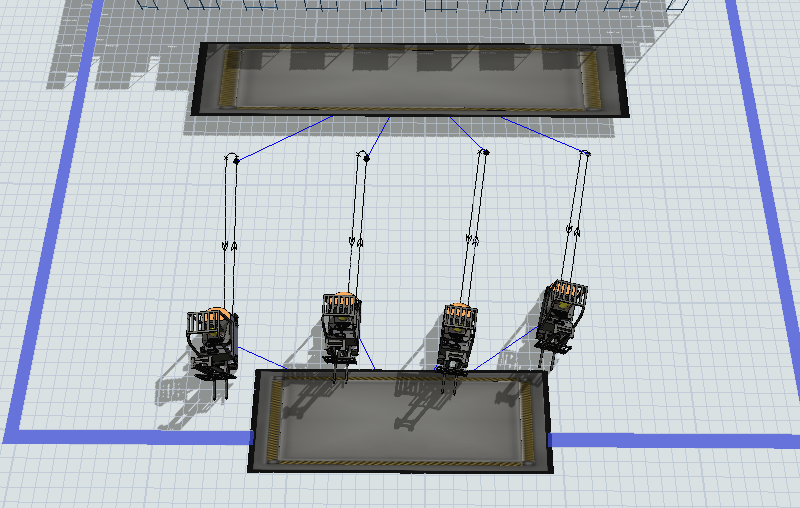
If you want the Operators to follow a specific path, you could treat them as AGV's and give them their own AGV paths to follow. In the following model, I replaced your nodes with control points and and made each path into a loop so the rotation orientation will be correct.
15 People are following this question.
FlexSim can help you understand and improve any system or process. Transform your existing data into accurate predictions.
FlexSim is a fully 3D simulation software environment. FlexSim can be used to simulate any process in any industry.
FlexSim®, FlexSim Healthcare™, Problem Solved.®, the FlexSim logo, the FlexSim X-mark, and the FlexSim Healthcare logo with stylized Caduceus mark are trademarks of FlexSim Software Products, Inc. All rights reserved.