Hi @Felix Möhlmann,
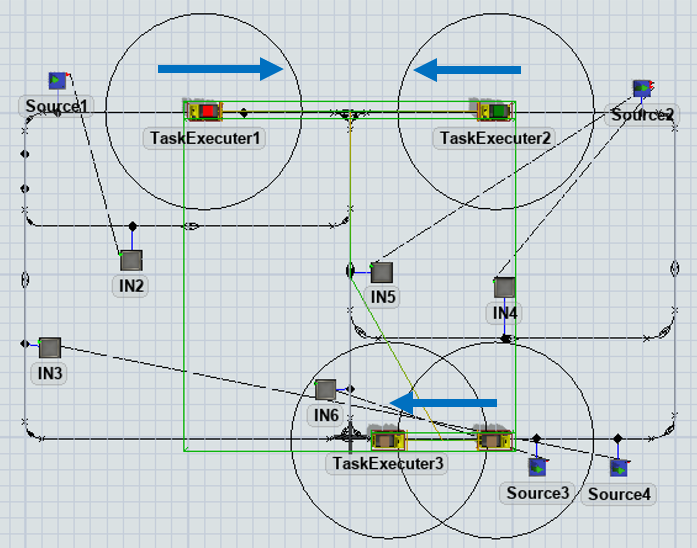
I would like to identify the moving direction of AGVs when they enter the broad phase.
If they are moving in the same direction, turns green and do nothing.
If they are moving in different direction, turns to red, and compare their distancetotravel() to decide they priority
I reference to your post, I guess this could help to achieve what I want to do. As I don't have a strong coding fundamental, I am not sure if I am writing in a correct way, hopefully to get some advices from you.
Thanks!
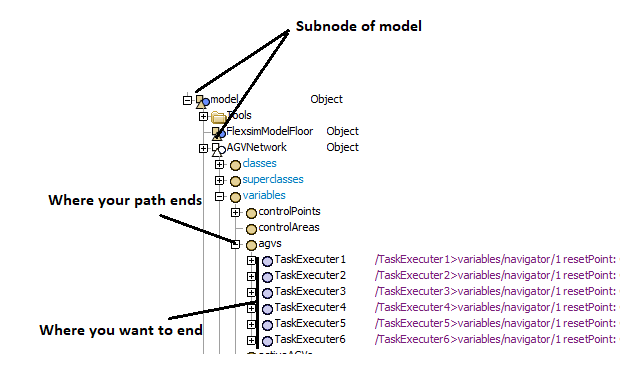
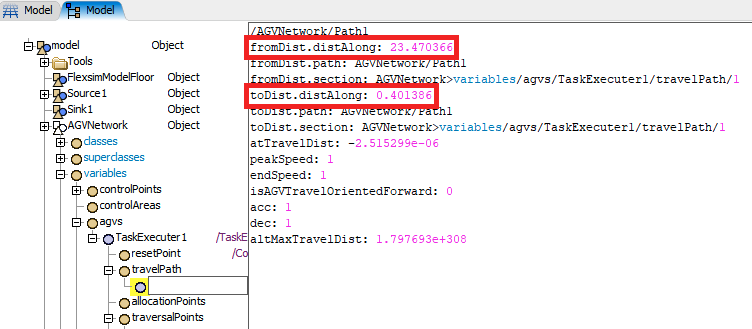 If you calculate the difference of those values, the sign (+/-) of the result will correspond to the travel direction.
If you calculate the difference of those values, the sign (+/-) of the result will correspond to the travel direction.