I'm trying to create an AGV network that carries different parts. Some allow the AGVs to rotate and do forward/reverse travel. Other parts don't allow rotation and the AGVs will just move sideways or crab.
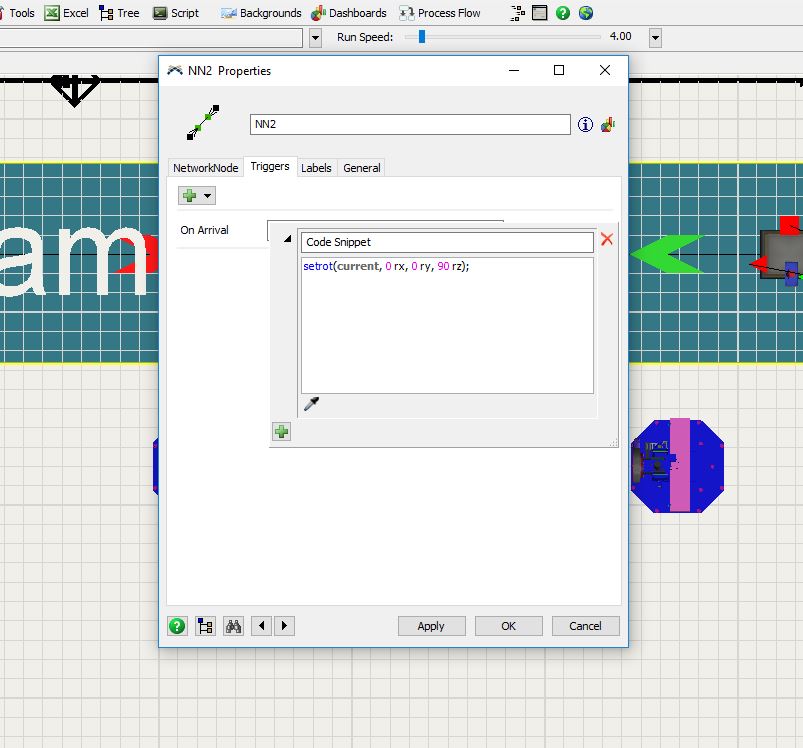
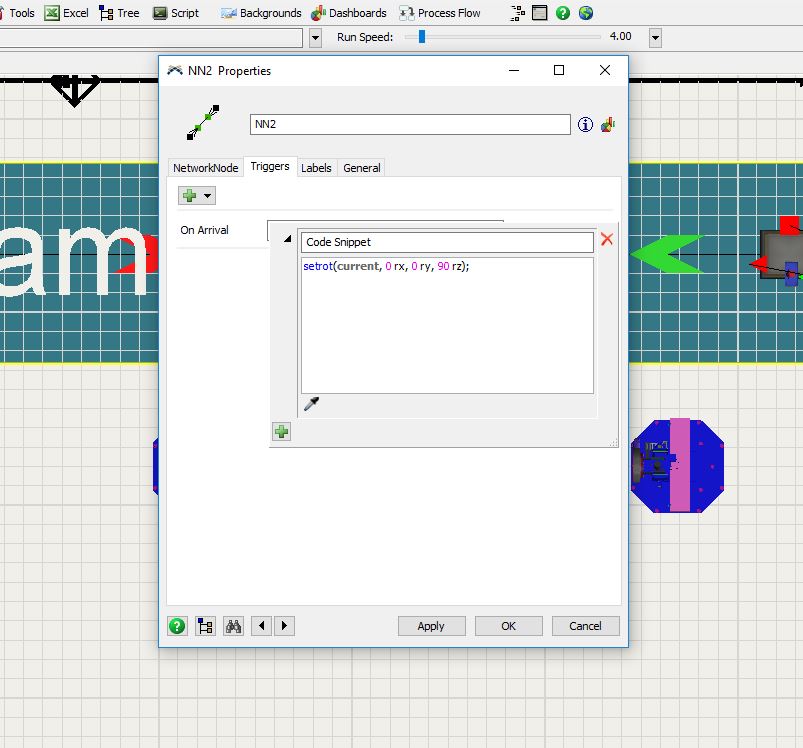
Attached model captures the essence of the situation in an overly simplified form. Travel network on left represents movement desired of the AGV system as TE maintains vertical orientation.

{kind=link}