I have a large AGV network, and recently added some new spurs for parking. I keep getting gridlock around the area where the parking spurs are. I've tried extra control areas, control points, spacing etc. and this keeps happening:
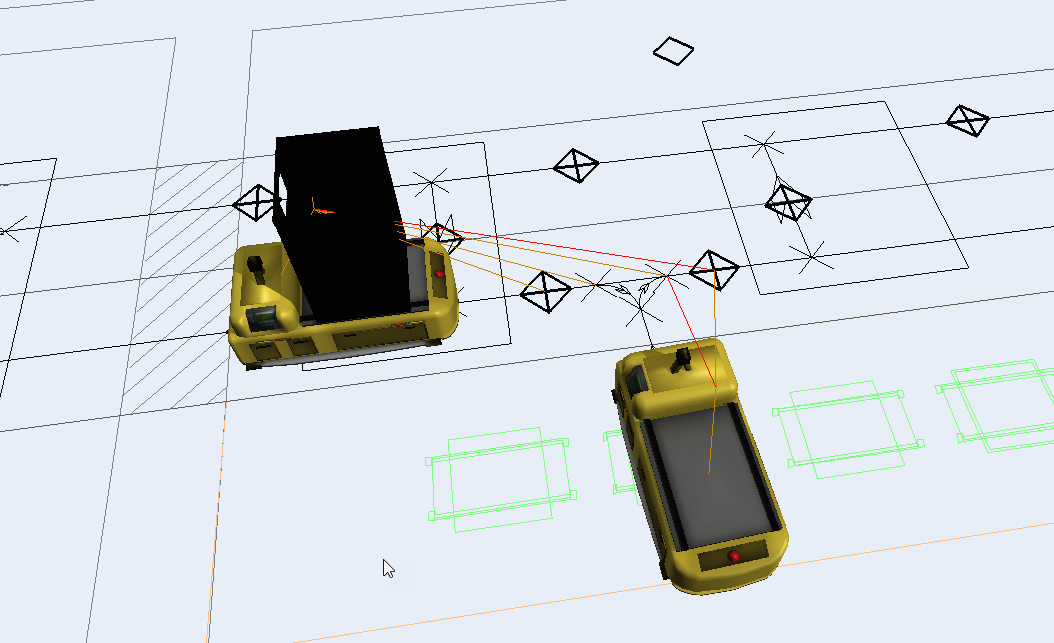
The AGV on the left has not even reached the next control point, but it has already allocated two path junction points which are further ahead, so that the AGV on the right cannot move out of the spur, even though it has allocated the control point to the right.
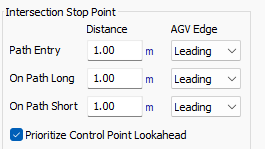
Is there any way I can change this "look ahead" allocation behavior? I've tried so many permutations and it just keeps happening!
Thanks.