Hi @anthony.johnson and all AGV module users!
We ran into an issue with an AGV model that I did not expect to happen. The model is as follows:
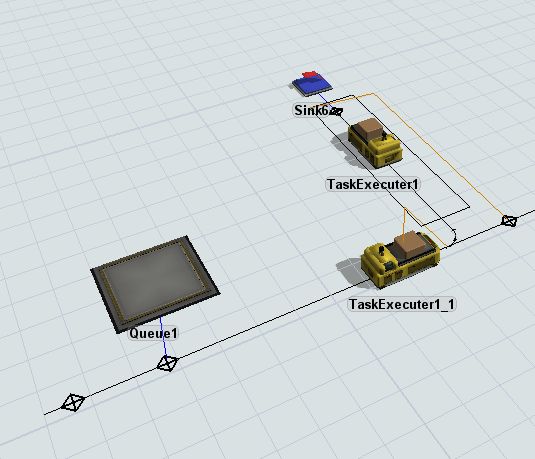
The main loop is going left to right here and sometimes AGVs (forklifts) need to deliver something to an object a little off the main path. Of course they need to turn into that path and back out the same way.
In this case both AGVs need to be at the Sink shown, due to accumulation they are following each other. Now as you can see from the accumulation arrows, a deadlock occurs because the leading AGV has the control area claimed but needs the transfer point right outside it, while the trailing AGV has the transfer point claimed but needs the area.
Making the area larger just moves the problem to the transfer point on the main loop. Making the area so large that it includes both transfer points means that AGVs going straight cannot pass while one is unloading in the control area, which is also not what you want.
What I don't get is why the trailing AGV claims a transfer point past the Control Point that it is supposed to hold at. What is the (elegant) way of solving this?
