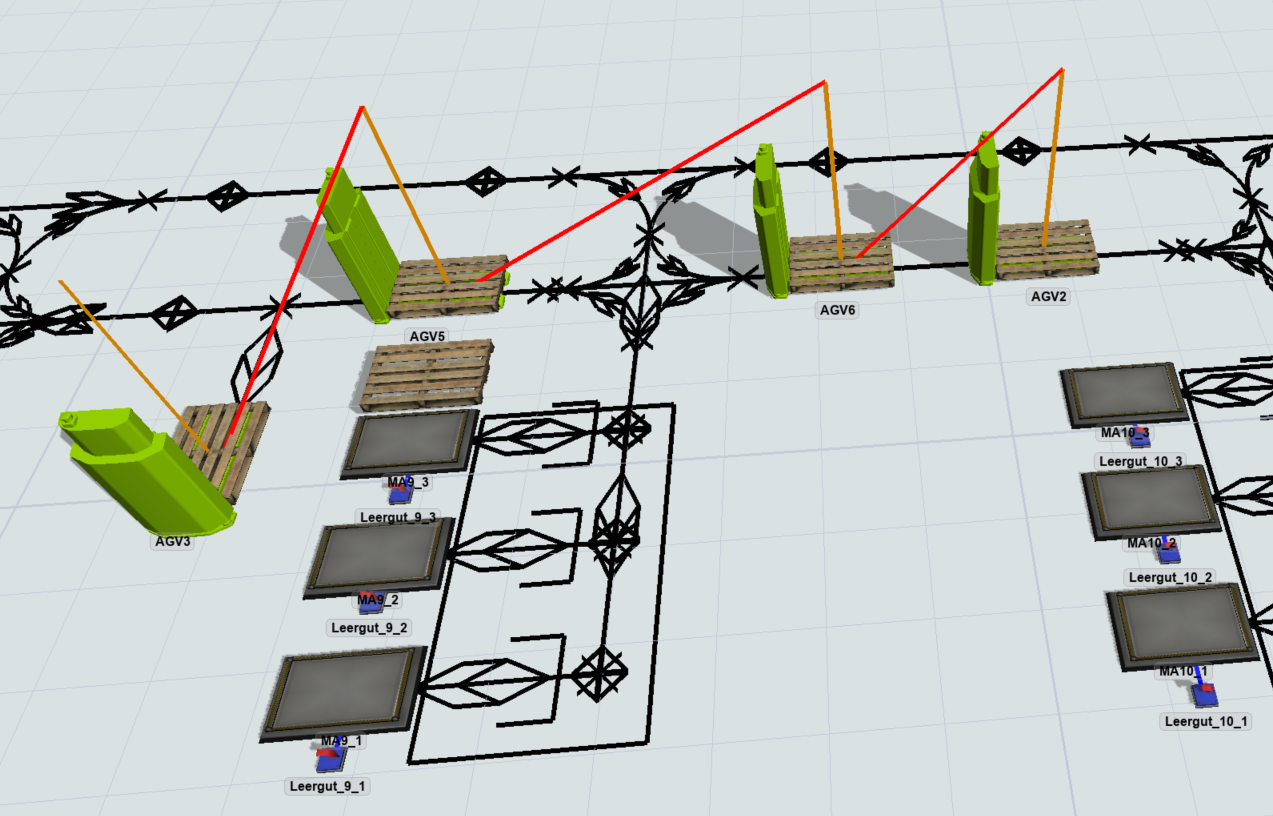
I want to pickup from two Controlpoints (blue rectangles in the picture below) the carriers from one queue and maybe at the same time, if there are enough agvs free.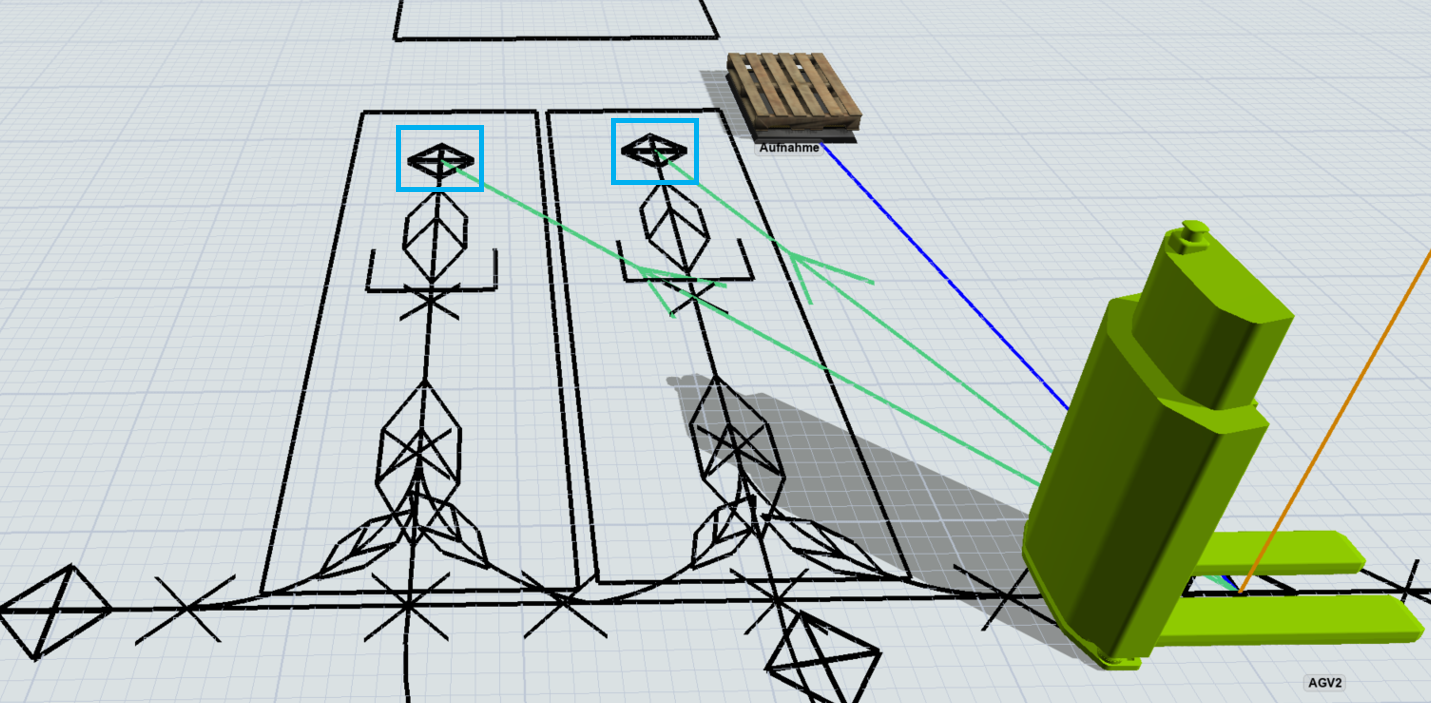
Thanks for the answer.
QA__2.fsm
AGV connections offer a couple of features that are useful for implementing this kind of logic.
- You can have FlexSim automatically create a list of any control point connection type. This list is partitioned by the control points the connections belong to.
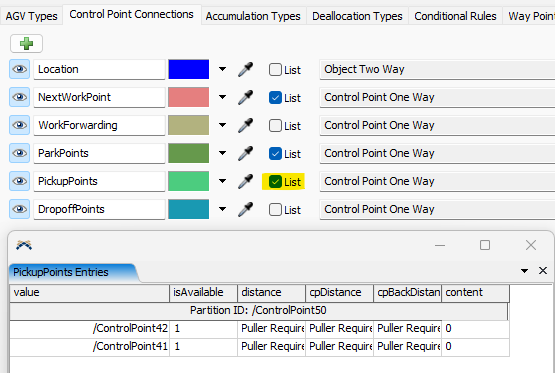
- You can query AGV connections with the AGV.Connections class. This makes it easy to check if such connections exist and get references to the connected control points from objects.
I edited the model, so the Process Flow checks if there are pickup points connected to the 'Location' CP the AGV is send to. If so, it pulls one of those from the list, travels there and only then loads the item. Added activities are marked in green.
This does mean that the AGV first come to a stop at the 'Location' CP. But you can of course further customize the logic or even use a similar implementation in general. (An object has multiple 'Location' connections, before an AGV is send to the object it first pulls one of those CPs from a list and is then send to that specific CP instead of the object.)
I also fixed two other small issues in the model that were causing exceptions:
- The resume distance must be greater than the stop distance in any AGV accumulation behaviour.
- You had typed "None" into a value field of a Statistics Collector. If you don't want to assign any value, just delete everything in the field. "None" will then appear as a placeholder text. If you type in "None" (without quotation marks), its interpreted as a code variable (that doesn't exist).
Thanks a lot. Is it possible to make this logic as well whne they are dropping off to "Abgabe"? - I would be very grateful for that.
I do have also one more question. The AGVs crashes each other and i couldnt fix it with proximity detection.
1. You can either use the same logic of having one 'Location' CP that is connected to multiple 'Pickup' CPs, one of which is chosen on arrival at the location CP.
Or, as I suggested in my previous answer, you pull one of the location CPs from a list before even starting the travel. This has the side effect, that no more than one AGV can be en route to a given CP at a time.
2. There isn't any be all end all solution for traffic control in an AGV network. Sometimes Accumulation Behaviors can fix an issue, other items more or fewer CPs are required.
I mostly saw two occasions where the AGVs clip through each other.
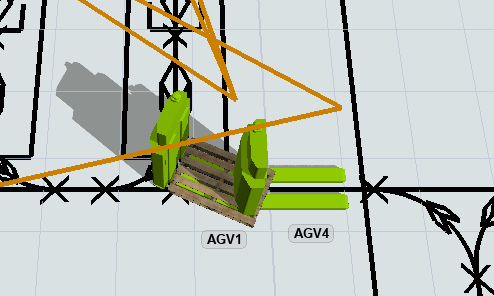
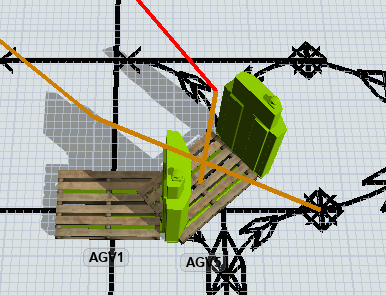
Because you set the "Stop and Rotate" treshold to 0° the AGVs come to a stop at all transfer points between paths even if they lead into a smooth curve. AGV1 and AGV4 in this screenshot have different destinations, so they can both continue at the same time. Because AGV1 stops at the transfer AGV4 clips into it, before AGV1 can fully enter the path.
Possible solutions (more than one may be applied):
- Set the "Stop and Rotate" threshold higher to AGV1 could continue around the curve at the same speed and be out of the way before AGV4 gets to the intersection.
- Add CPs closer to the intersection to force following AGVs to wait until the intersection is clear.
 - Activate the Accumulation Behaviour on the main path.
- Activate the Accumulation Behaviour on the main path.
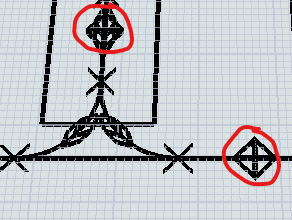
The turning AGV has to wait for the next CP. Since its not on the main path anymore, other AGVs can pass it, clipping through it in the process.
Possible solutions:
- Move the CP at which the turning AGV is waiting further on the path so other AGVs can drive by it without clipping.
- If there is not enough space for AGVs to move past the waiting AGV on both sides, remove the CP at which the turning AGV is waiting, so it would have to wait on the main path ahead of the intersection.
thanks!!
Now i have the problem that around 10470 Secounds all agvs are standing and do not drive anyway.
Is there a possibility that the items lay on the control points and not in the queue?
To avoid deadlocks, AGVs that can not pull their destination CP should probably move to the nearest siding/parkCP.
You can simply move pallets into the CP once the token has pulled one.
You seem to have changed the shape factors of the pallet so appear correctly when placed in a queue (?). The reason the pallets appear to the side of the queues is because the queues are too small. The better solution here is to either make the queues large enough so that the pallet can fit (with some padding space) or set the queue to "Stack Vertically" instead of using the "Stack Inside Queue" option.
I have reverted the changes to the pallet shape factors so they are easier to place correctly on the CPs and also the AGVs. You still need to change the queue sizes/settings.
17 People are following this question.