In the attached example model an AGV is preempted after passing a control area but while the area is still allocated. The new travel task has the AGV change direction and start heading toward the area again. But it leaves the path at an intersection before reaching the control area.
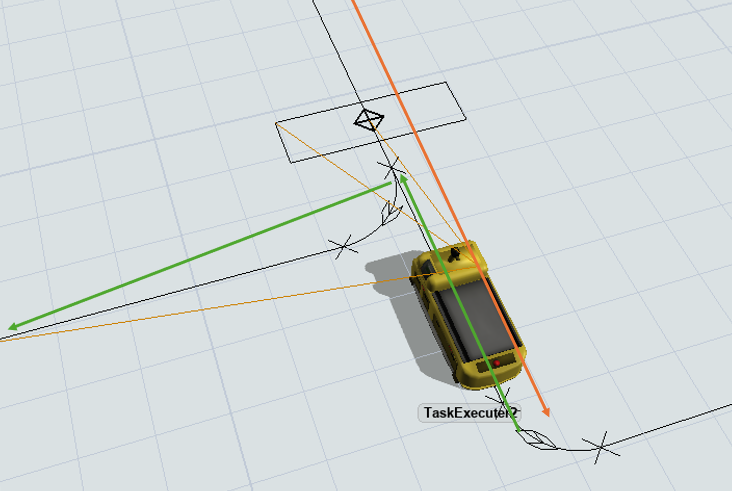
(The orange arrow shows the original path, the green arrows the path after the preemption)
Under these (admittedly very specific) circumstances, the control area remains allocated by the AGV.
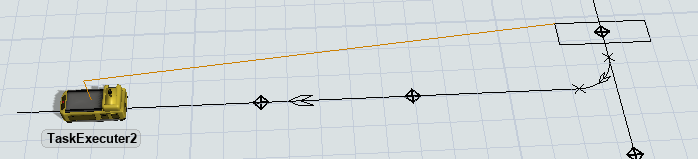 (Idle AGV after finishing the new travel task)
(Idle AGV after finishing the new travel task)
For a workaround I found that this does not happen if the preemption follows a Pre-Arrival (or Arrival) event of the AGV. I guess because preempting AGVs at that point is expected vs. it happening at any point during the travel.
