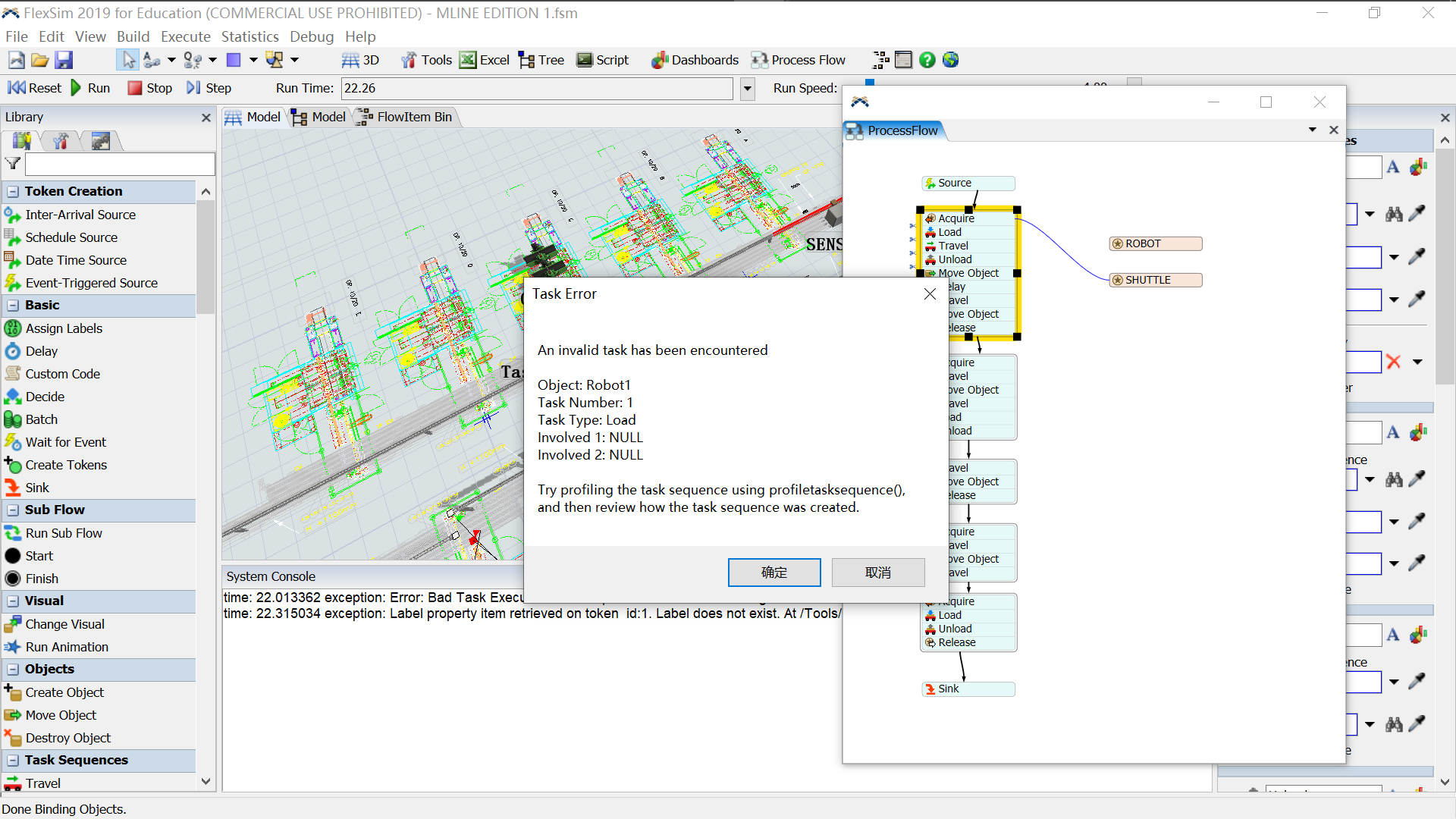
I have a question that I want this process flow only working on the process operation between queue1 and queue2. It including the operation of robot1, task executor and OP10+OP20. But I don't understand what is the problem makes it doesn't work.
I have a question that I want this process flow only working on the process operation between queue1 and queue2. It including the operation of robot1, task executor and OP10+OP20. But I don't understand what is the problem makes it doesn't work.
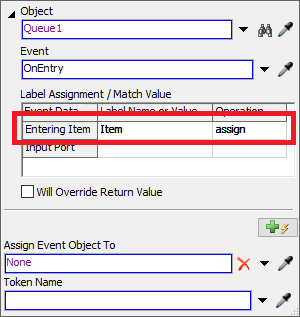
The biggest issue is that you didn't assign the item to a label value in the Event-triggered Source activity.
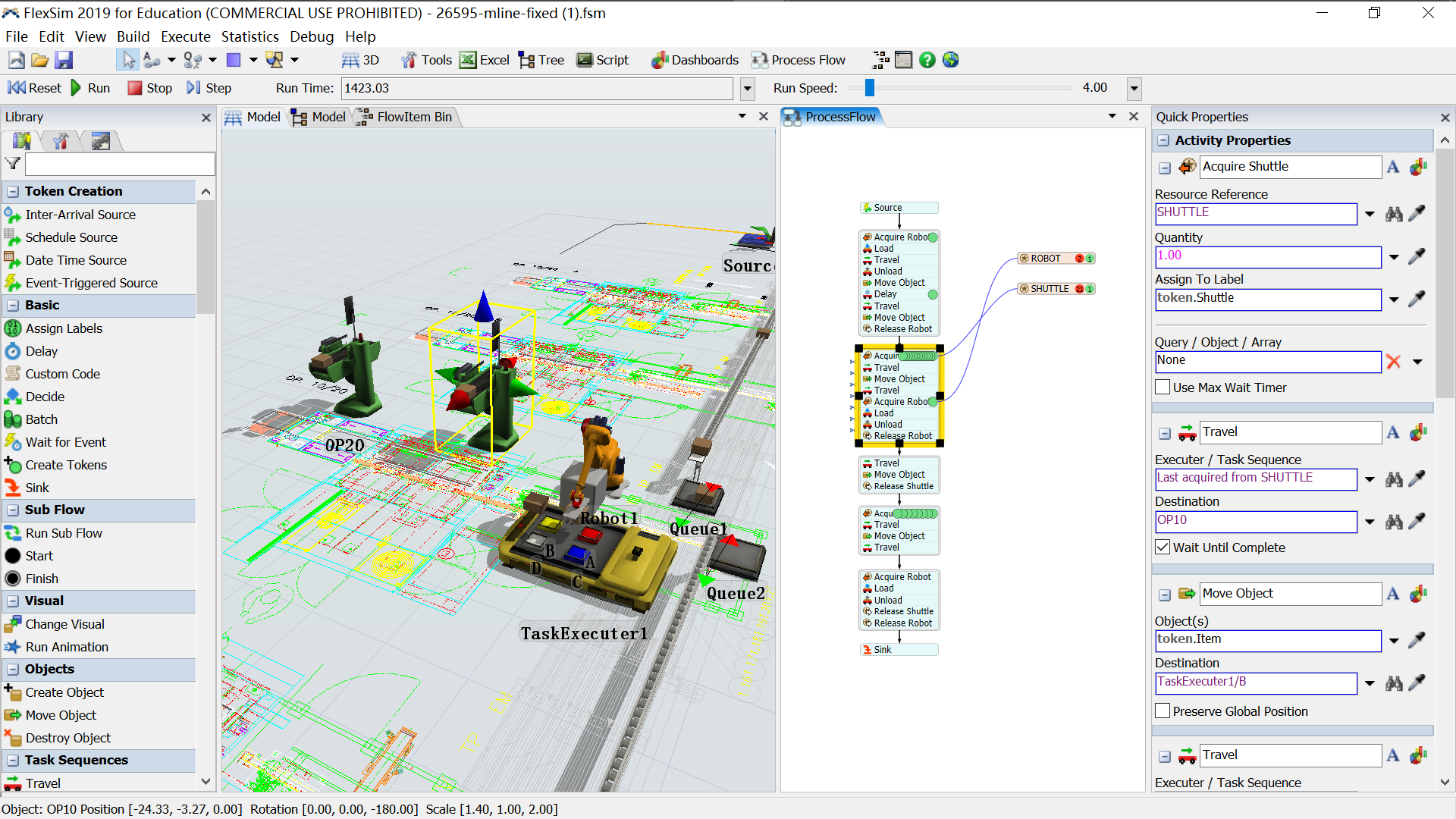
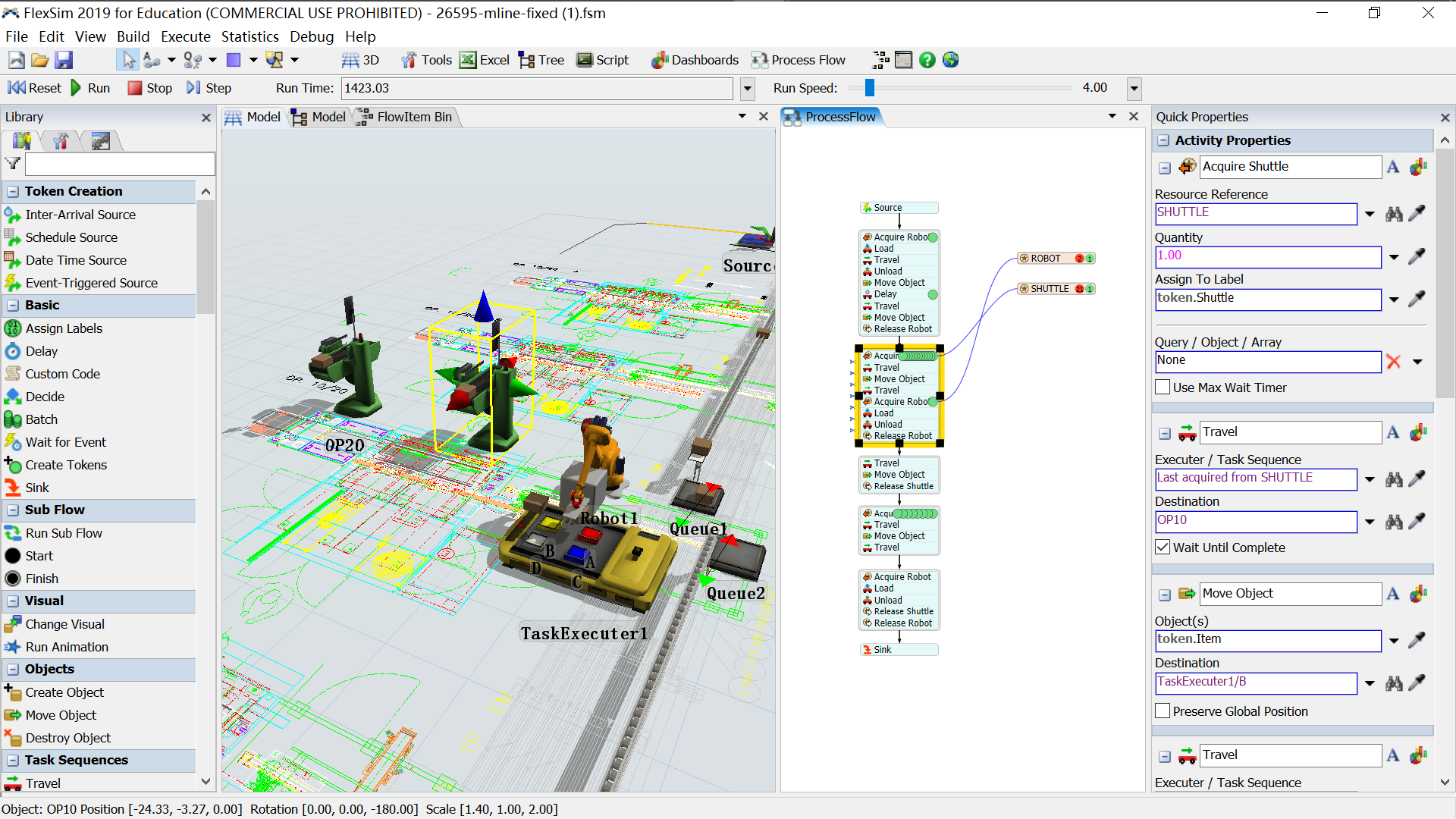
But you also needed to go through all the activities and make sure you're passing the right references into all the fields. Take a look at this cleaned up model:
Thank you, I am trying to understand your suggestion and sets of flow. But I also find in the model that you have edited and upload to show me, the task executor does not move. is it just the problem of the flexsim doesn't show the movement or I need to do some more change?
Because i find that the sequence of the box moving seems correct, but the box doesn't stay on the subnode QUEUE A, it seems like stay in the air. So this makes me puzzle. Makes me cannot make sure this is the problem of animation or it still needs me to change some set in the flow.
The TE doesn't move because it's not attached to a navigator. Just open its properties and choose Default Navigator in the Navigator field.
The positioning int the queues is weird because they are set to use "Stack inside queue", but the item is bigger than the queue. I changed the queues to use "Stack Vertically" and it looks better.
And i also find that the task executor seems acquire several boxes on one subnode per time. But i actually set each queue can only content one box. so should I set some "decide" and "wait for event" to solve this?
The processor's max content value is used by the processor and other 3D objects to know when they can send and receive items. However, if you're using process flow to directly put items inside the processor then this mechanism doesn't do anything.
You could add another resource for each of the processors and make the items acquire and release the processors, or you might be able to enforce the processor's max content just by changing when the items acquire and release the robot or shuttle.
14 People are following this question.
FlexSim can help you understand and improve any system or process. Transform your existing data into accurate predictions.
FlexSim is a fully 3D simulation software environment. FlexSim can be used to simulate any process in any industry.
FlexSim®, FlexSim Healthcare™, Problem Solved.®, the FlexSim logo, the FlexSim X-mark, and the FlexSim Healthcare logo with stylized Caduceus mark are trademarks of FlexSim Software Products, Inc. All rights reserved.
{kind=link}
{kind=link}