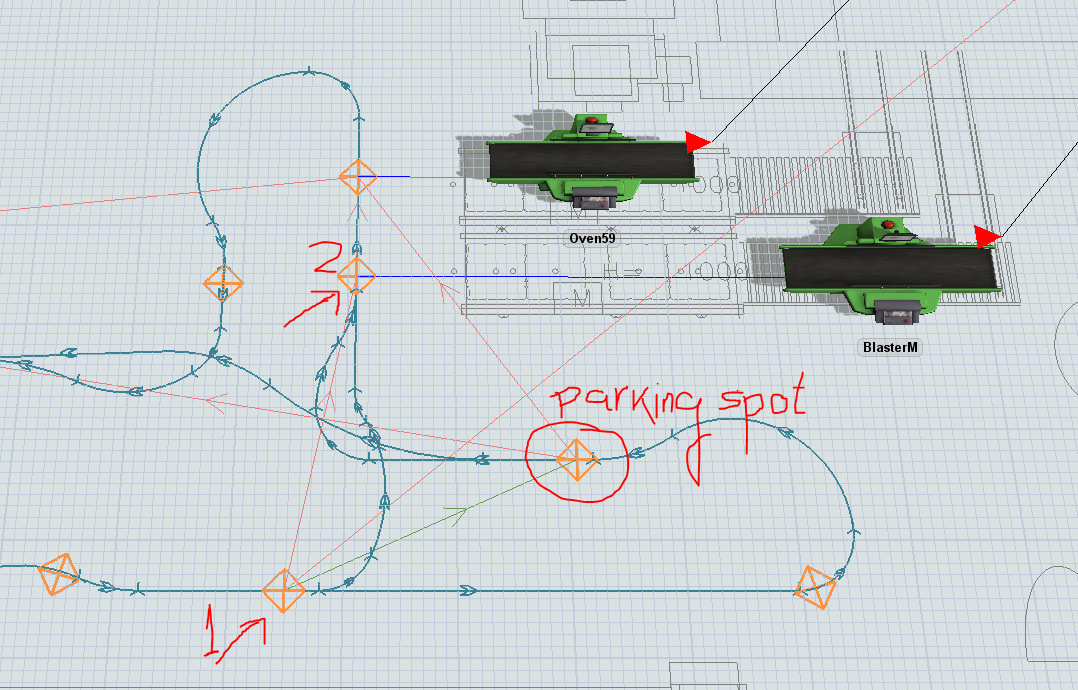
 Hello! I have the following situation in my model and I would like to know how to program it. I would like that every time an AGV arrives at the control point 1 (see the picture) it goes to the parking spot and stays there for 1 minute recharging batteries. If an AGV arrives at the Control Point 1 and there is an AGV at the parking spot, it will go to the Control Point 2.
Hello! I have the following situation in my model and I would like to know how to program it. I would like that every time an AGV arrives at the control point 1 (see the picture) it goes to the parking spot and stays there for 1 minute recharging batteries. If an AGV arrives at the Control Point 1 and there is an AGV at the parking spot, it will go to the Control Point 2.
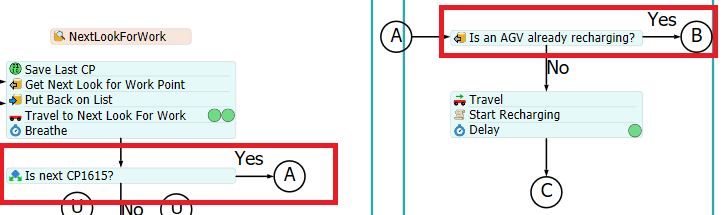
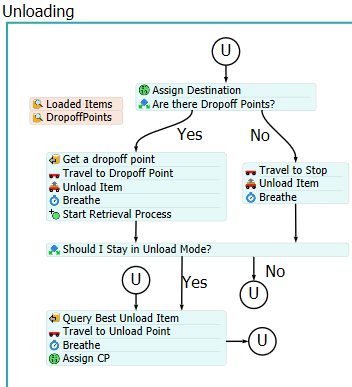
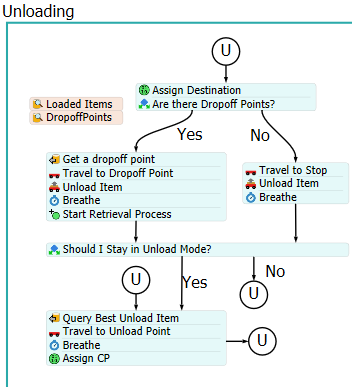
I tried to use way points but it does not work properly. For the AGV network logic I am using the AGV template and the NextLookForWork loop.

{kind=link}