Hello,
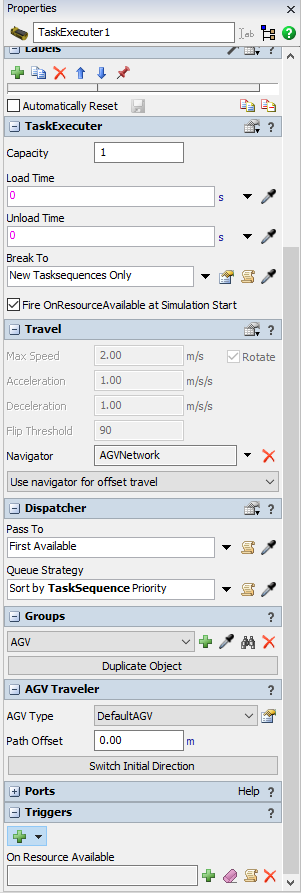
I want to add some parking logic to my model. I want to park the AGVs every time they don't have any task to do.
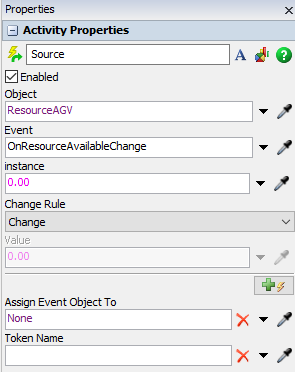
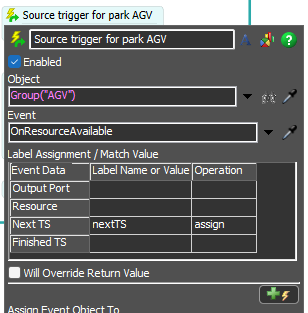
I can't find the right trigger event to send the AGV to the parking spots.
I'm trying it with the "event trigger source OnStaytimeChange" but then I get weird events where the AGVs park from one parking spot to another. Sometimes it happens that the AGV has no tasks and stops at the last control point, and the event trigger source does not send it to the parking spot.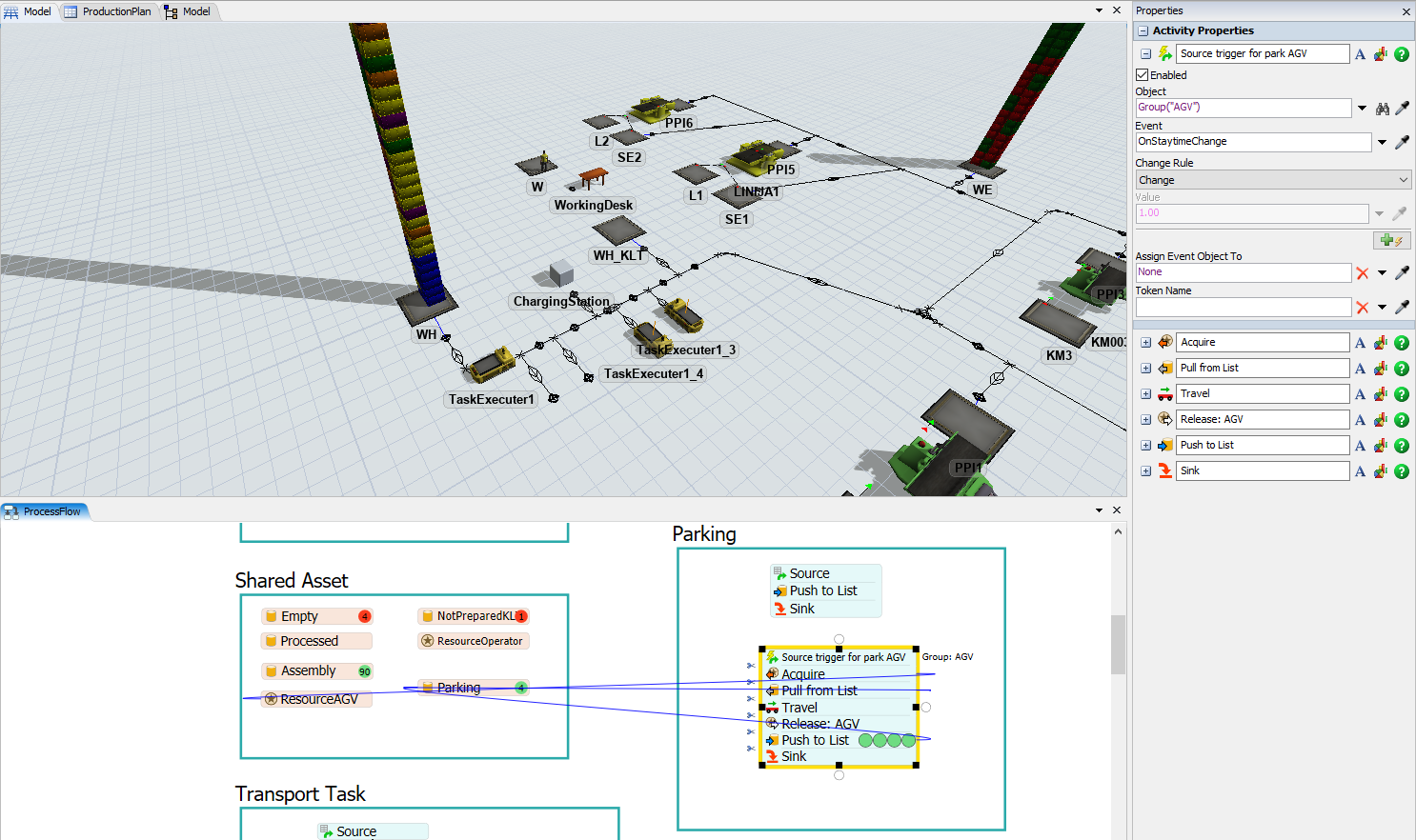
my model: test160.fsm
Hope you understand my question.Thank you in advance for your answers.
Best regards