Hello Everyone!
I'm working on a model, that requires the AGV to transport material to different departements, according to the attached diagram .
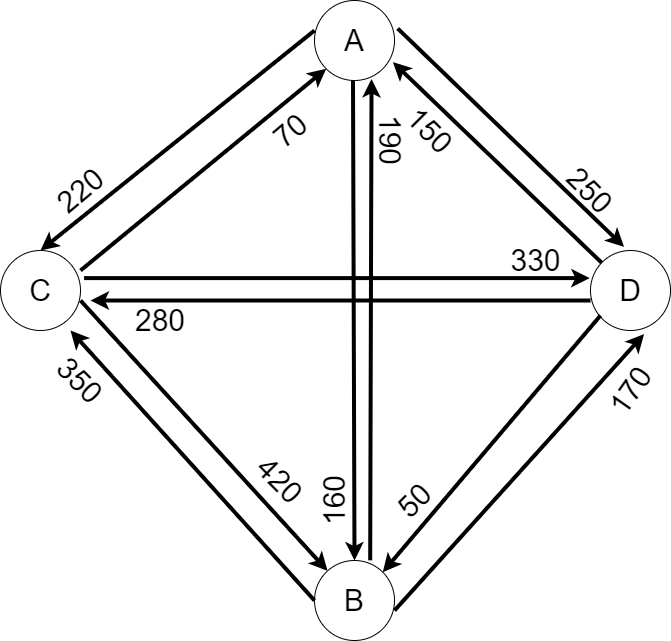
Each department (A,B, C and D) has a Dropoff Point and a Pickup Point, that are connected to a "Next Look For Work" Loop. The goal here is to transport the material from all the "QueueX_Y" to the respective "SinkY_X", in the minimal distance possible only loading and unloading the material in the BL (Blue Zone) of the respective departement. In order to do so i'm using the "Next Look for Work". On of the issues that I notice when I run the simulation is that when it reaches the "07h0min0sec 01/05/2021", in the simulation runtime, the "QueueX_Y" from department D and A are empty, however, the task executer keeps going there even though it knows that there is no work to do. What i'm looking for here is a way to prevent that happeing. So when the "QueueX_Y" are empty, the task executer should only go to those departments for dropoff material in the respective sink. Is that possible to implement? If possible, how can I make it?
Thank you for your atention!
