Hi,
I have a question about AGV train routing. In my model, a complex railway network connects several stations that process the train wagon objects. Once finished, a task is dispatched to an AGV to move this train wagon object to its next processing station. The route from the pickup towards the dropoff location can however be blocked by another train wagon object that is being processed. The AGV thus receives several requests (messages) but not all of them can be executed at every moment because the route is blocked. I would like to test in advance if the route between a pickup and dropoff location is available and filter out all the 'blocked' tasks.
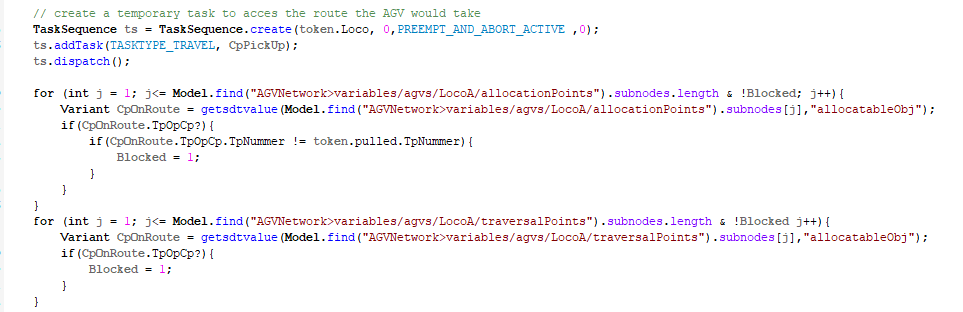
Is there a way to determine what route the AGV would take from the pickup to the dropoff location and evaluate if control points on that route are already allocated?
Asses the AGV route between pickup and dropoff control points in advance
FlexSim 21.0.2
@Roeland S I'm not sure how you control the driving over the AGV network, but you can let the train travel from control point to control point with the travel task. And if you have a list with available control points you can pull one before you start travelling and either put it on a list with points being used and pull it from there when the point is available again or remove it and put the control point back on the list when it becomes available again.
Hope this helps?

15 People are following this question.

{kind=link}