hi, recently I'm learning AGV module. I have some confused problems.
1. There several types of control point connections, control point tell AGV it's destination. So one control point can connect to above one different control points depending on how many destination it can go to? For example, following CP A can connect to both CP B and CP C?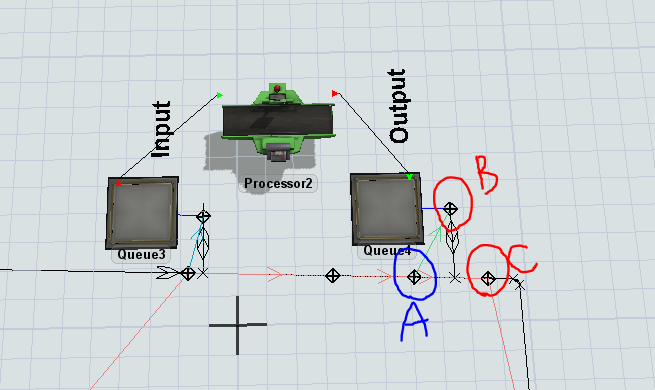
2. My understanding is some CPs are used for defining a location, some are for AGV making decision. Such as the CP B in above picture is for Look for Work, CP A is a location that represents Queue4? When connect one CP to next CP, what's the difference in NextLookForWork and LookForWork?
3. I know in FlexSim, there are built-in AGV process flow that can be used directly. But after I complete 3D model and connections, do I have to set in anything to let AGV follow those logic to execute tasks? What is the built-in rule for excecuting tasks (pull from list), is it FIFO? And if I'd like to use custom dispatching rules, simply revise from the original Process flow(without build a logic from beginning)? And the places that I need to revise is to by determine when to let push to list happen, also set in list reference?
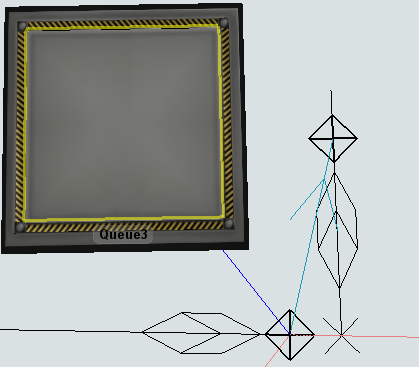
Attached is my model, but it still can not transfer on path at the moment. One station.fsm I'm really lack of concept in AGV module. Thank you for your patience and assistance in advance!

{kind=link}