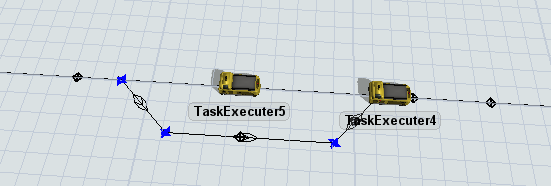
I have a question about AGV routing. In this simple model I attached you can see that taskexuter4 has 2 possible routes to go to ControlPoint12. If I click on show routing accessibility for CP12, it also shows that this is a possible route.
If I let an AGV travel to the middle CP on the straight path first, obviously that CP is allocated and then I would expect the other AGV to choose the second possible route, however he doesn't and he keeps waiting until the middle CP gets deallocated. How is it that the AGV doesn't recognize the 2 possible routes?