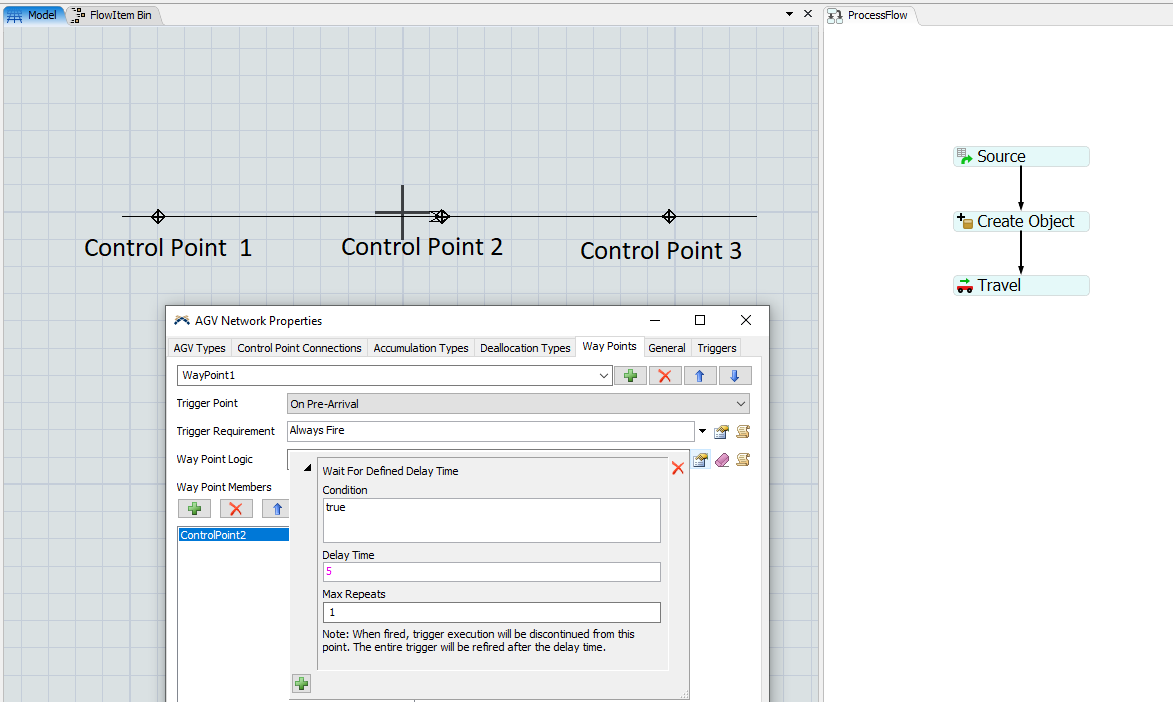
As shown in below image
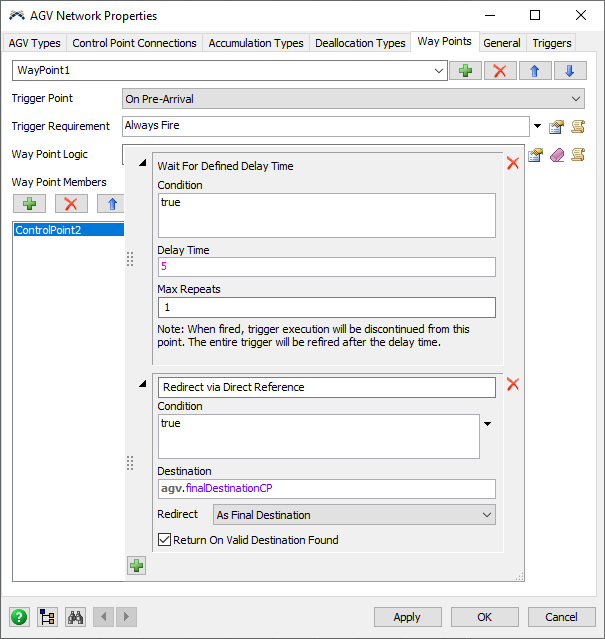
AGV is travelling from Control point 1 to Control Point 3. At Control Point 2 I need to delay for certain time I would like to use Way point logic here. When I tried using way point it is not working.
Attached model for your reference. Any feedback how to achieve that.