For Overhead AGV Network System, there are 4 questions I have.
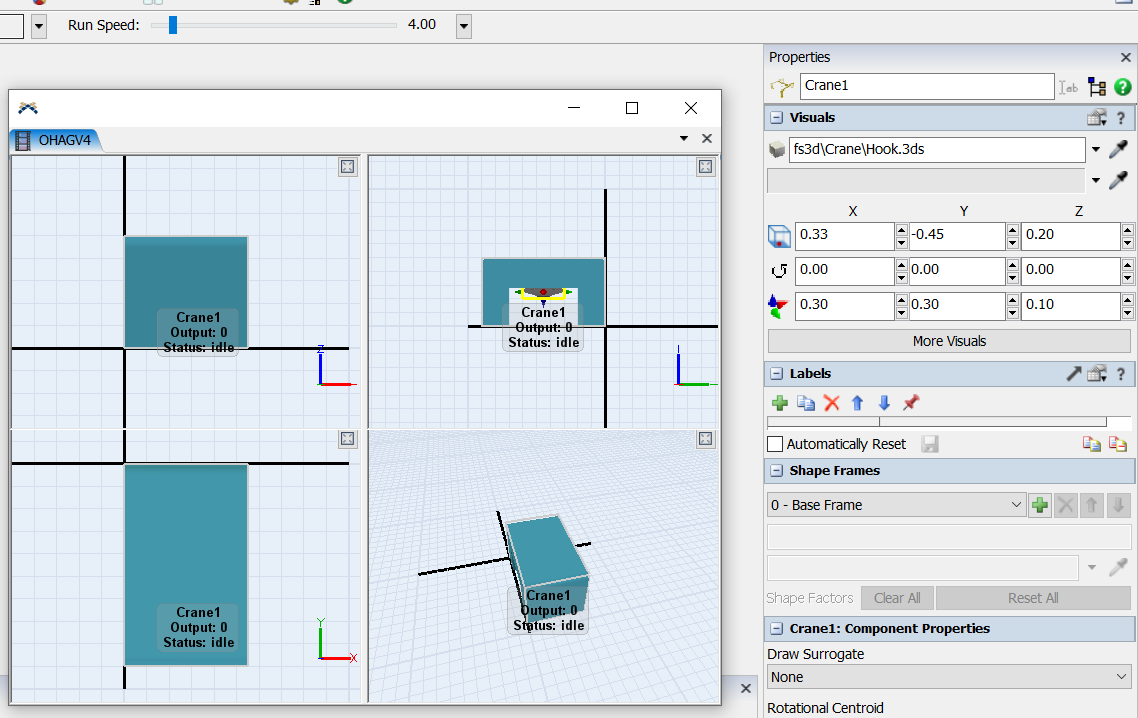
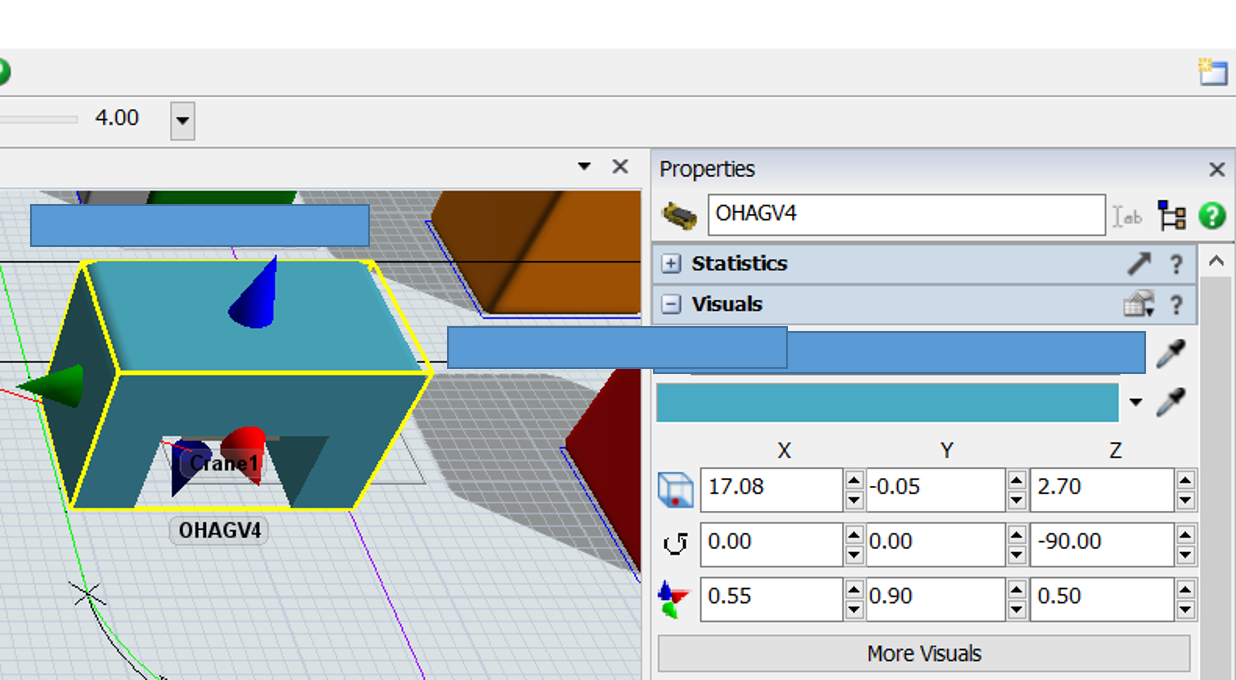
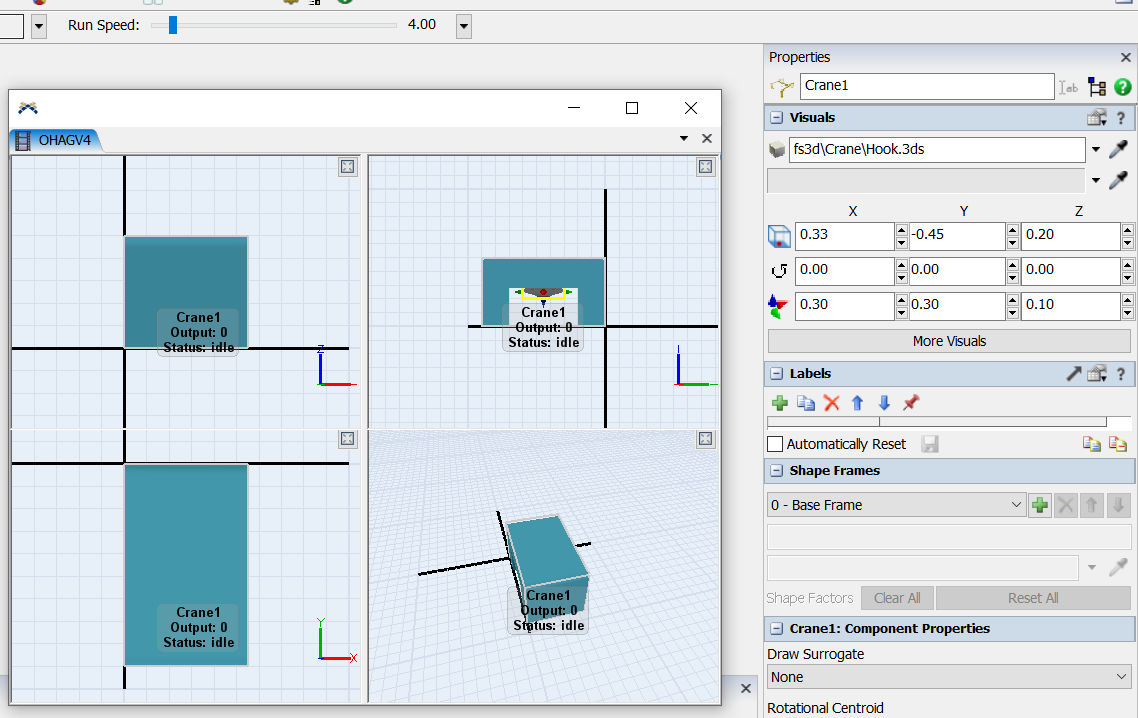
AGV overhead would need a gripper lifting up and down when loading/unloading. I used the hook of a crane as the task executer, and use another shape to display an OHAGV. But now I have problem with how to let the hook lift down when loading/unloading? Or I should use other task executer instead?
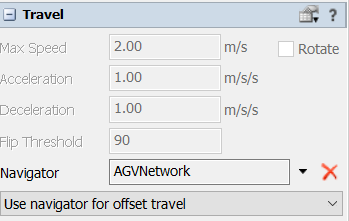
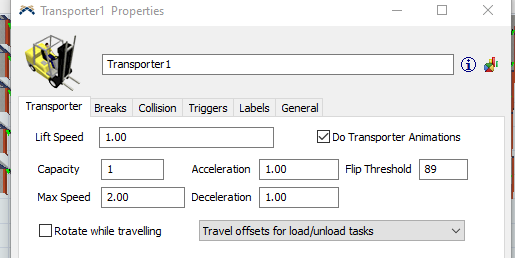
How to change task executer travel speed? Because the panel on the right hand side is not available. In AGV Network Properties panel, it could set forward speed there, but what' the difference between these two setting?
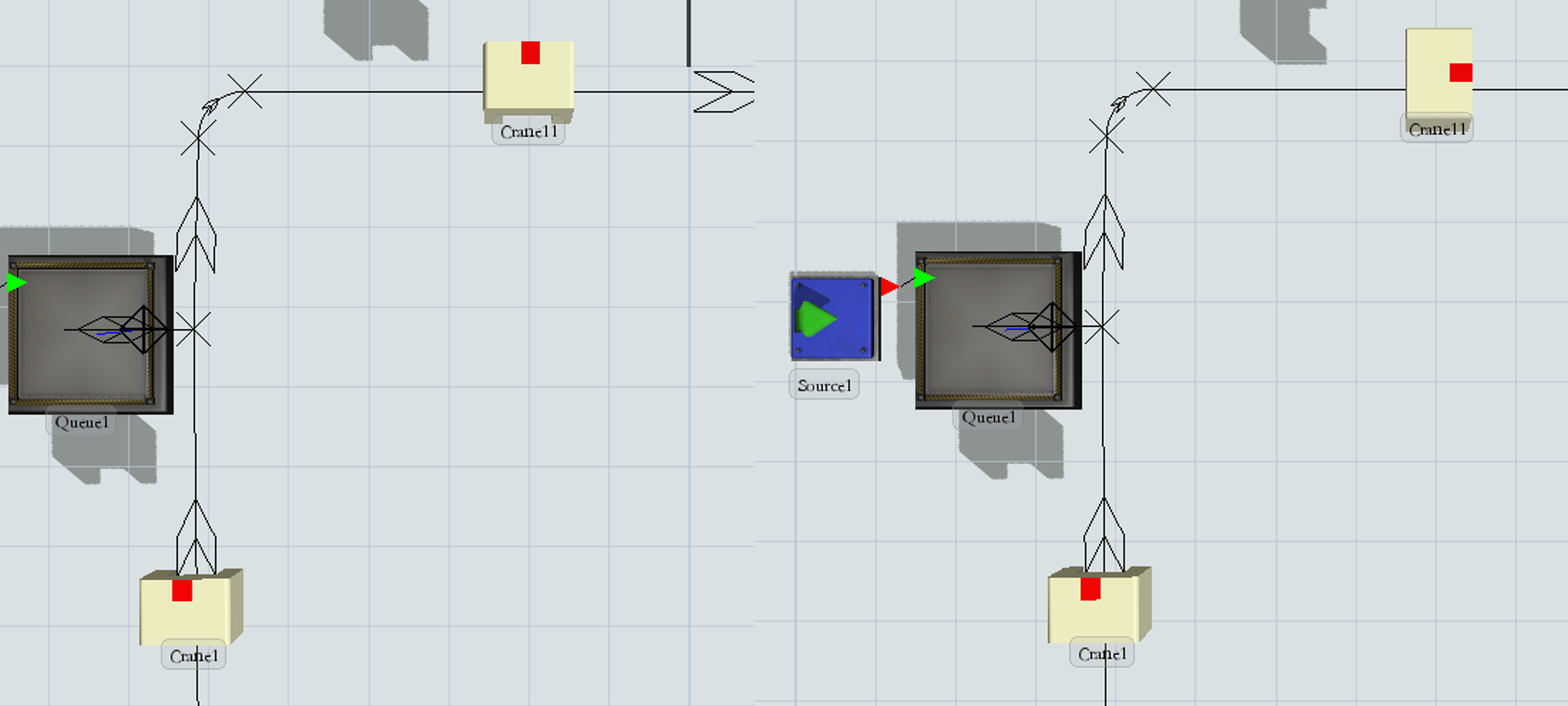
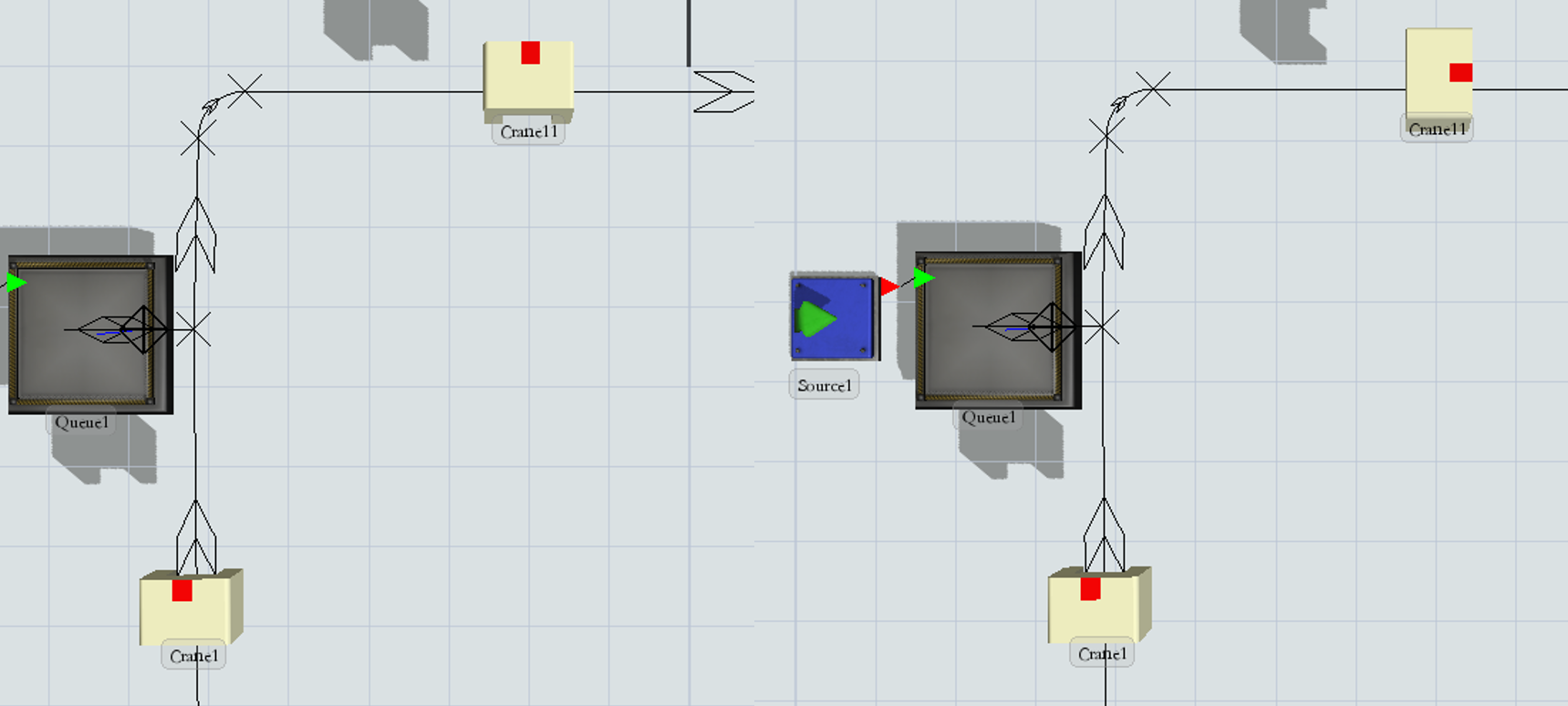
Also when AGV is traveling from vertical direction to horizon direction. Generally it will rotate like the picture on right hand side, but I need AGV not rotating its head, which is like left picture.
My last problem is there any ways to group all AGV network(paths and control point)? As this AGV system is not working on the floor, I prefer an efficient way to adjust network height after building the entire network.
Attached are my model and the yellow AGV chassis I used.

{kind=link}
{kind=link}