I created a simple model that loads an AGV from a processor. I am curious how to setup a step that allows a robot to remove the item from the AGV. See attached image. I am looking for Robot 2 to remove the flow item from the AGV when it arrives at the control point in front. It currently dumps to the sink when the simulation runs.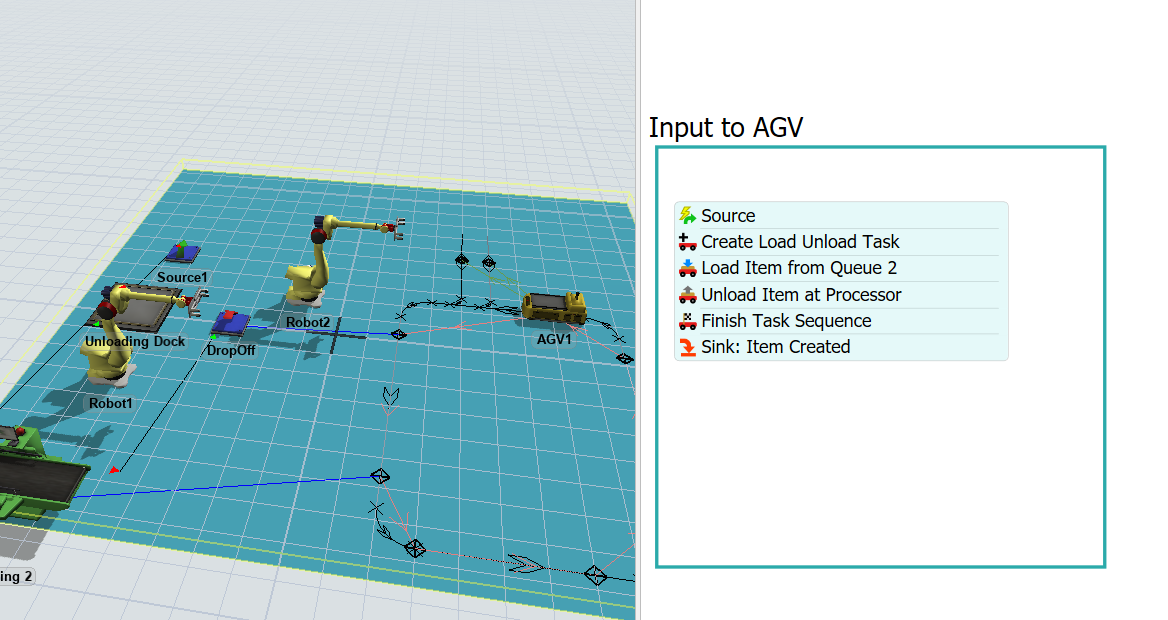
Removing Items from AGV
FlexSim 21.2.0
Hello @Michael D6,
I have adjusted your model to accomplish the desired task. I adjusted the AGV Process Flow to not unload itself but to wait to be unloaded. I added a copy of your process to move items from the Unloading Dock to the Processor and adjusted the necessary inputs to have the other robot move items from the AGV to the other queue.
Hope this helps!
15 People are following this question.
