I'm studying by looking at the sample model below.
https://www.youtube.com/watch?v=3AQ-cjOS9tY
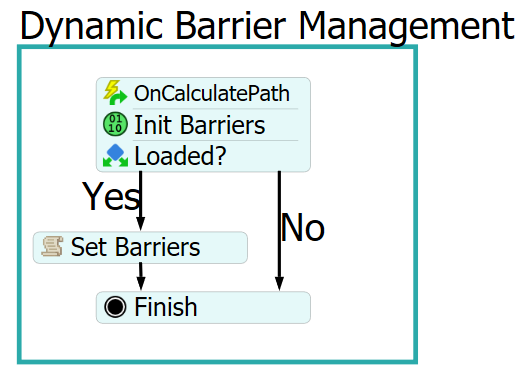
There is something I don't understand about "Dynamic Barrier Management" introduced in this video.
I think the custom code "SetBarriers" controls the barriers, but I don't know how to control them.
Specifically, I think that slotItems is set as a barrier target in "token.Barriers = items;". Is this perception correct? If so, where is this "token.Barriers" used?
Please give me advice.